pcregisterndt
Register two point clouds using NDT algorithm
Syntax
Description
tform = pcregisterndt(moving,fixed,gridStep)gridStep.
The registration algorithm is based on the normal-distributions transform (NDT)
algorithm [1]
[2]. Best performance of
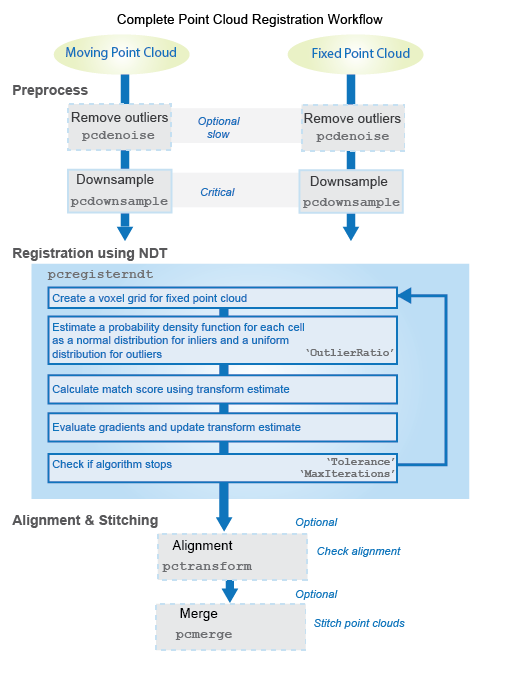
this iterative process requires adjusting properties for your data. To improve
accuracy and efficiency of registration, consider downsampling the moving point
cloud by using pcdownsample before using
pcregisterndt.
[___] = pcregisterndt(___,
specifies options using one or more name-value arguments in addition to any
combination of arguments from previous syntaxes. For example,
Name=Value)MaxIterations=20 stops the NDT algorithm after 20 iterations.
Examples
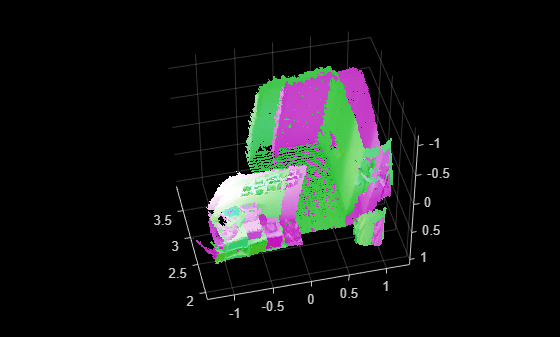
Load point cloud data.
ld = load('livingRoom.mat'); moving = ld.livingRoomData{1}; fixed = ld.livingRoomData{2}; figure pcshowpair(moving,fixed,VerticalAxis='Y',VerticalAxisDir='Down')
To improve the efficiency and accuracy of the NDT registration algorithm, downsample the moving point cloud.
movingDownsampled = pcdownsample(moving,'gridAverage',0.1);Voxelize the point cloud into cubes of sidelength 0.5. Apply the rigid registration using the NDT algorithm.
gridStep = 0.5; tform = pcregisterndt(movingDownsampled,fixed,gridStep);
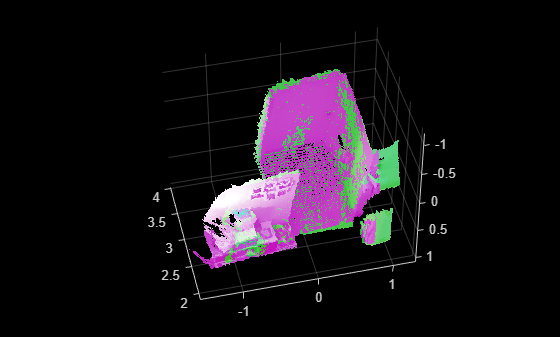
Visualize the alignment.
movingReg = pctransform(moving,tform); figure pcshowpair(movingReg,fixed,VerticalAxis='Y',VerticalAxisDir='Down')
Construct a velodyneFileReader object.
veloReader = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E');
Read and visualize two lidar point clouds.
frameNumber = 1; skipFrame = 5; fixed = readFrame(veloReader,frameNumber); moving = readFrame(veloReader,frameNumber + skipFrame);
Segment the ground plane and remove it from the fixed point cloud.
groundPtsIdxFixed = segmentGroundFromLidarData(fixed);
fixedSeg = select(fixed,~groundPtsIdxFixed,OutputSize='full');Segment the ground plane and remove it from the moving point cloud.
groundPtsIdxMoving = segmentGroundFromLidarData(moving);
movingSeg = select(moving,~groundPtsIdxMoving,OutputSize='full');Downsample the moving point cloud to improve accuracy and the efficiency of processing the points.
movingDownsampled = pcdownsample(movingSeg,gridAverage=0.2);
Register the moving point cloud with respect to the fixed point cloud.
gridStep = 5; tform = pcregisterndt(movingDownsampled,fixedSeg,gridStep);
Transform the moving point cloud using an estimated rigid transformation.
movingReg = pctransform(moving,tform);
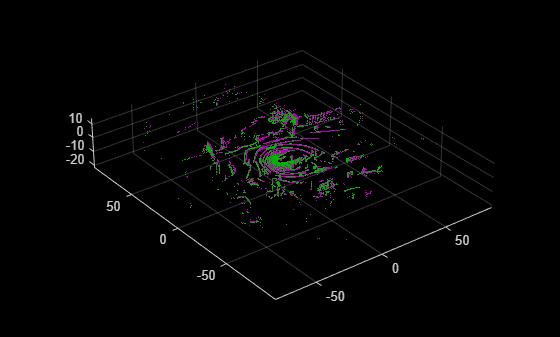
Visualize the alignment of the point clouds.
figure pcshowpair(movingReg,fixed)
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
References
[1] Biber, P., and W. Straßer. “The Normal Distributions Transform: A New Approach to Laser Scan Matching.” Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, NV. Vol. 3, November 2003, pp. 2743–2748.
[2] Magnusson, M. “The Three-Dimensional Normal-Distributions Transform — an Efficient Representation for Registration, Surface Analysis, and Loop Detection.” Ph.D. Thesis. Örebro University, Örebro, Sweden, 2013.
Extended Capabilities
Version History
Introduced in R2018aSee Also
Functions
pcregistercorr|pcregistericp|pcregistercpd|pctransform|pcshow|pcshowpair|pcdownsample|pcfitplane|pcdenoise|pcmerge