ROS 2 Network Connection and Exploration
Connect to ROS 2 to prototype robotics applications and access robotics hardware
or simulators over a ROS network. You can create your own ROS network using
MATLAB® or connect to an existing ROS 2 network. To set up a ROS 2 network,
create a ROS 2 node using ros2node object.
You can access ROS 2 parameters using ros2param
object and its object functions.
The ros2rate
object helps control the timing of code execution.
You can also visualize a comprehensive overview of a ROS 2 network graph by using the ROS 2 Network Analyzer app.
Apps
| ROS 2 Network Analyzer | Visualize and analyze nodes, topics, services, and actions interaction in ROS 2 network (Since R2024b) |
Functions
Objects
Blocks
| Blank Message | Create blank ROS 2 message using specified message type |
| Current Time | Retrieve current ROS 2 time or system time (Since R2022b) |
| Get Parameter | Get ROS 2 parameter value (Since R2022b) |
Topics
- Connect to ROS 2 Network and Establish Communication
Connect to ROS 2 network using nodes and establish communication through different interface types.
- Get Started with ROS 2 Network Analyzer App
Use ROS 2 Network Analyzer app to visualize and analyze nodes, topics, services, and actions interaction in ROS 2 network. (Since R2024b)
Featured Examples

Switching Between ROS Middleware Implementations
Switch between different ROS 2 middleware implementations in MATLAB and Simulink®.

Use ROS Bridge to Establish Communication Between ROS and ROS 2
Control the TurtleBot3 in Gazebo using keyboard commands from MATLAB.

Access the tf Transformation Tree in ROS 2
Access tf Transformation Tree in ROS 2.
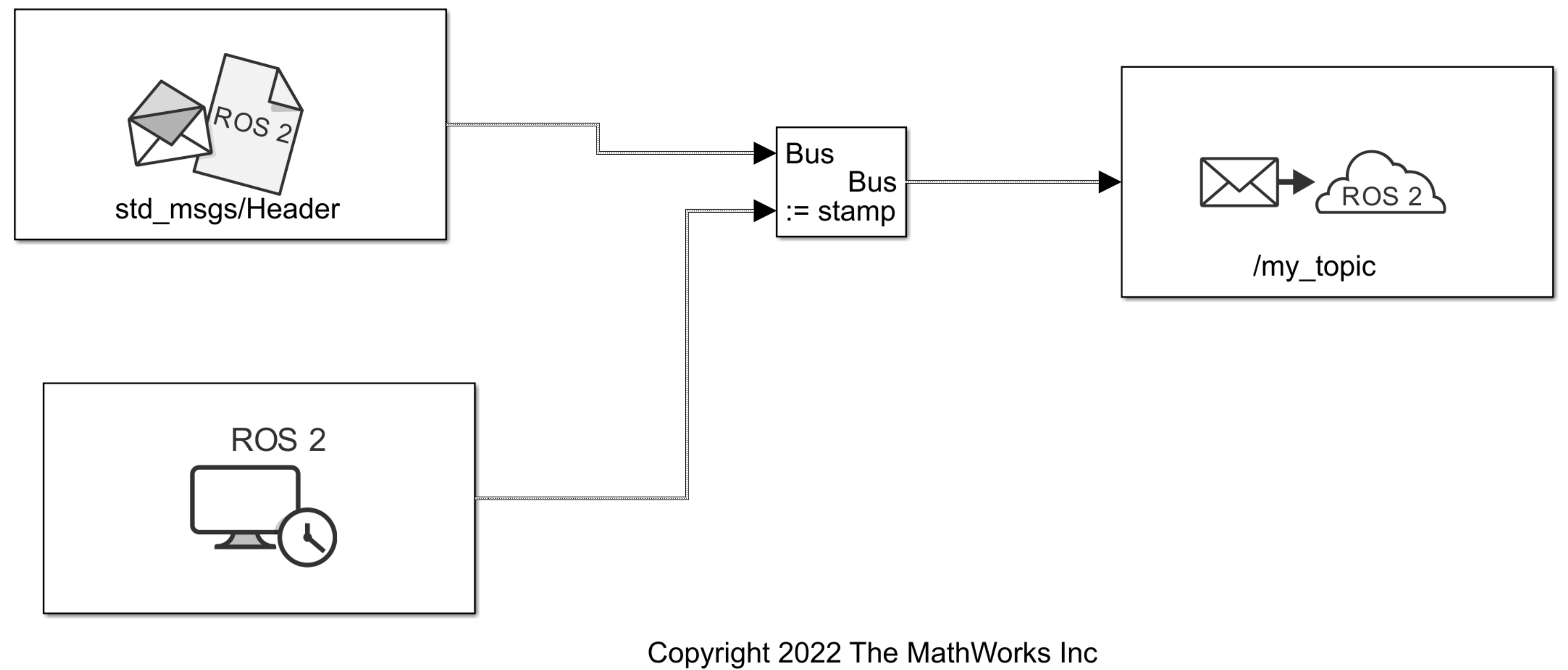
Time Stamp ROS 2 Message Using Current Time in Simulink
Time stamp a ROS 2 message with the current system time of your computer.