approximateEntropy
Measure of regularity of nonlinear time series
Syntax
Description
approxEnt = approximateEntropy(___,Name,Value)Name,Value pair arguments.
Examples
For this example, generate two signals for comparison a random signal xRand and a perfectly regular signal xReg. Set rng to default for reproducibility of the random signal.
rng('default');
xRand = double(randn(100,1)>0);
xReg = repmat([1;0],50,1);Visualize the random and regular signals.
figure; subplot(2,1,1); plot(xRand); title('Random signal'); subplot(2,1,2); plot(xReg); title('Perfectly regular signal');
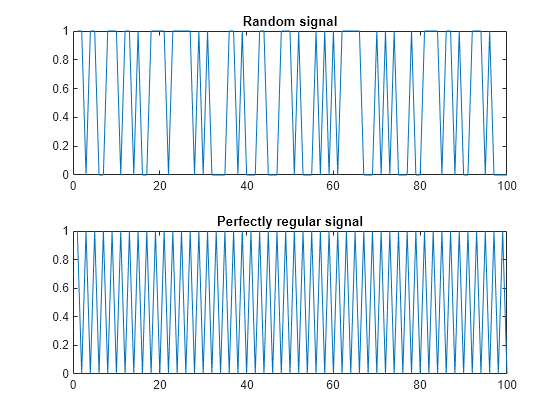
The plots show that the regular signal is more predictable than the random signal.
Find approximate entropy of the two signals.
valueReg = approximateEntropy(xReg)
valueReg = 5.1016e-05
valueIrreg = approximateEntropy(xRand)
valueIrreg = 0.6849
The approximate entropy of the perfectly regular signal is significantly smaller than the random signal. Hence, the perfectly regular signal containing many repetitive patterns has a relatively small value of approximate entropy while the less predictable random signal has a higher value of approximate entropy.
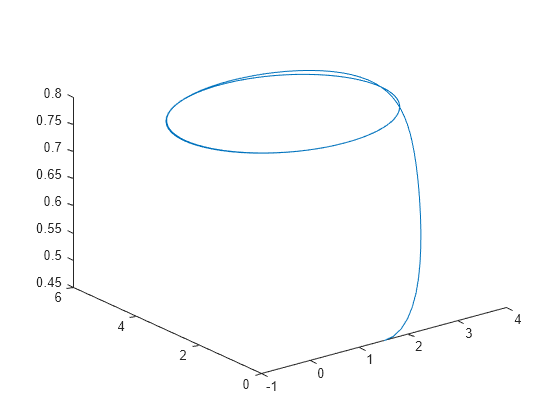
In this example, consider the position data of a quadcopter, following a circular path. The file uavPositionData.mat contains the x, y and z-direction position data traversed by the copter.
Load the data set and visualize the quadcopter path in 3D.
load('uavPositionData.mat','xv','yv','zv'); plot3(xv,yv,zv);
For this example, use only x-direction position data for computation. Since Lag is unknown, estimate the delay using phaseSpaceReconstruction. Set 'Dimension' to 3. The Dimension and Lag parameters are required to compute the approximate entropy of the data.
dim = 3; [~,lag] = phaseSpaceReconstruction(xv,[],dim)
lag = 4
Find the approximate entropy using the Lag value obtained in the previous step.
approxEnt = approximateEntropy(xv,lag,dim)
approxEnt = 0.1088
Since the quadcopter is traversing a pre-defined circular trajectory of fixed radius, the position data is regular and hence, the value of approximate entropy is low.
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
Approximate entropy is computed in the following way,
The
approximateEntropyfunction first generates a delayed reconstruction Y1:N for N data points with embedding dimension m, and lag τ.The software then calculates the number of within range points, at point i, given by,
where 1 is the indicator function, and R is the radius of similarity.
The approximate entropy is then calculated as where,
References
[1] Pincus, Steven M. "Approximate entropy as a measure of system complexity." Proceedings of the National Academy of Sciences. 1991 88 (6) 2297-2301; doi:10.1073/pnas.88.6.2297.
[2] U. Rajendra Acharya, Filippo Molinari, S. Vinitha Sree, Subhagata Chattopadhyay, Kwan-Hoong Ng, Jasjit S. Suri. "Automated diagnosis of epileptic EEG using entropies." Biomedical Signal Processing and Control Volume 7, Issue 4, 2012, Pages 401-408, ISSN 1746-8094.
[3] Caesarendra, Wahyu & Kosasih, P & Tieu, Kiet & Moodie, Craig. "An application of nonlinear feature extraction-A case study for low speed slewing bearing condition monitoring and prognosis." IEEE/ASME International Conference on Advanced Intelligent Mechatronics: Mechatronics for Human Wellbeing, AIM 2013.1713-1718. 10.1109/AIM.2013.6584344.
[4] Kantz, H., and Schreiber, T. Nonlinear Time Series Analysis. Cambridge: Cambridge University Press, 2003.
Extended Capabilities
Version History
Introduced in R2018a