addPlanner
Syntax
Description
addPlanner(
adds the plan function of a planner as a function handle plannerBM,planFcn)planFcn to the
plannerBenchmark
object.
addPlanner(
also adds the initialization function of a planner as a function handle
plannerBM,planFcn,initializationFcn)initializationFcn to the plannerBenchmark
object.
addPlanner(___,
specifies options using one or more name-value arguments in addition to any combination of
input arguments from previous syntaxes.Name=Value)
Examples
Create an occupancy map from an example map.
load("exampleMaps.mat","simpleMap"); map = occupancyMap(simpleMap);
Create a state validator with stateSpaceSE2 using the map.
sv = validatorOccupancyMap(stateSpaceSE2,Map=map);
Specify the start and goal states.
start = [5 8 pi/2]; goal = [7 18 pi/2];
Create a plannerBenchmark object.
pbo = plannerBenchmark(sv,start,goal);
Define the function handles for the initialization functions of the planners.
plannerHAFcn = @(sv)plannerHybridAStar(sv); plannerRRTSFcn = @(sv)plannerRRTStar(sv.StateSpace,sv);
Define the function handle for the plan function, which is common for both planners.
plnFcn = @(initOut,s,g)plan(initOut,s,g);
Add the path planners for benchmarking.
addPlanner(pbo,plnFcn,plannerHAFcn);
addPlanner(pbo,plnFcn,plannerRRTSFcn,PlannerName="ppRRTStar");Set the rng for repetitive results.
rng('default')Run the path planners for the number of times specified in runCount to collect metrics.
runCount = 5; runPlanner(pbo,runCount)
Initializing plannerHAFcn_plnFcn ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using plannerHAFcn_plnFcn. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5. Initializing ppRRTStar ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using ppRRTStar. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5.
Access path length metric for all the runs on the environment.
[pLenSummary,pLenData] = metric(pbo,"pathLength")pLenSummary=2×4 table
Mean Median StdDev sampleSize
______ ______ _______ __________
plannerHAFcn_plnFcn 10.204 10.204 0 5
ppRRTStar 12.84 12.9 0.67112 5
pLenData=2×5 table
Run1 Run2 Run3 Run4 Run5
______ ______ ______ ______ ______
plannerHAFcn_plnFcn 10.204 10.204 10.204 10.204 10.204
ppRRTStar 13.8 12.9 12.2 12 13.3
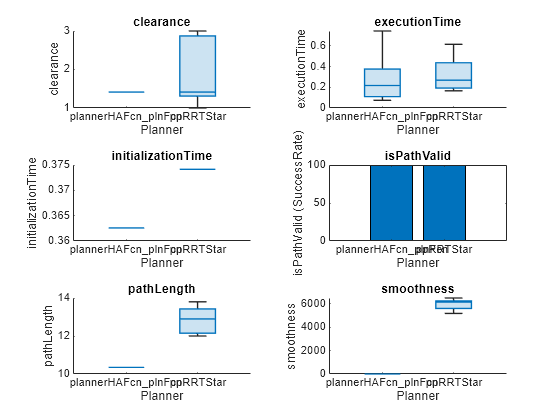
Visualize all the metrics.
show(pbo)
Closely inspect the clearance metric.
figure
show(pbo,"clearance")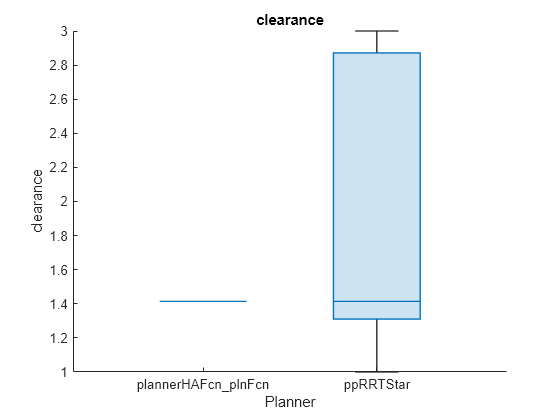
Input Arguments
Name-Value Arguments
Version History
Introduced in R2022a