binaryOccupancyMap
Belegungsraster mit Binärwerten erstellen
Beschreibung
binaryOccupancyMap erstellt ein zweidimensionales Belegungskartenobjekt, mit dem Sie einen Roboterarbeitsbereich einschließlich Hindernissen darstellen und visualisieren können. Durch die Integration von Sensordaten und Positionsschätzungen entsteht eine räumliche Darstellung der ungefähren Standorte der Hindernisse.
Belegungsraster werden in Roboteralgorithmen wie beispielsweise der Pfadplanung verwendet. Sie werden außerdem in Kartierungsanwendungen verwendet, beispielsweise zum Suchen kollisionsfreier Pfade, zum Vermeiden von Kollisionen und zum Berechnen der Lokalisierung. Sie können Ihr Belegungsraster an Ihren spezifischen Anwendungszweck anpassen.
Jede Zelle im Belegungsraster hat einen Wert, der den Belegungsstatus dieser Zelle darstellt. Ein belegter Standort wird als true (1) und ein freier Standort als false (0) dargestellt.
Das Objekt verfolgt drei Referenzrahmen: Welt, Lokal und Raster. Der Ursprung des Weltrahmens wird durch GridLocationInWorld definiert, das die untere linke Ecke der Karte relativ zum Weltrahmen definiert. Die Eigenschaft LocalOriginInWorld gibt die Position des Ursprungs des lokalen Frames relativ zum Welt-Frame an. Die erste Rasterposition mit dem Index (1,1) beginnt in der oberen linken Ecke des Rasters.
Hinweis
Dieses Objekt hieß zuvor robotics.BinaryOccupancyGrid.
Erstellung
Syntax
Beschreibung
map = binaryOccupancyMap erstellt ein zweidimensionales binäres Belegungsraster mit einer Breite und Höhe von 10m. Die Standardrasterauflösung beträgt eine Zelle pro Meter.
map = binaryOccupancyMap(rows,cols, erstellt ein zweidimensionales binäres Belegungsraster der Größe (resolution,"grid")rows,cols).
map = binaryOccupancyMap( erstellt ein Raster aus den Werten in der Matrix p)p. Die Größe des Rasters entspricht der Größe der Matrix, wobei jeder Zellenwert anhand seiner Position in der Matrix interpretiert wird. p enthält jeden numerischen oder logischen Typ mit Nullen (0) und Einsen (1).
map = binaryOccupancyMap( erstellt eine Karte aus einer Matrix mit der p,resolution)Resolution-Eigenschaft, angegeben in Zellen pro Meter.
map = binaryOccupancyMap( erstellt ein Objekt unter Verwendung von Werten eines anderen sourcemap)binaryOccupancyMap-Objekts.
map = binaryOccupancyMap( erstellt ein Objekt unter Verwendung von Werten eines anderen sourcemap,resolution)binaryOccupancyMap-Objekts, reskaliert die Matrix jedoch neu, um die angegebene Auflösung zu erreichen.
map = binaryOccupancyMap(___, legt Eigenschaften mithilfe eines oder mehrerer Name-Wert-Argumente fest.Name=Value)
Eingabeargumente
Eigenschaften
Objektfunktionen
copy | Create copy of binary occupancy map |
checkOccupancy | Check if locations are free or occupied |
getOccupancy | Get occupancy value of locations |
grid2local | Convert grid indices to local coordinates |
grid2world | Convert grid indices to world coordinates |
inflate | Inflate each occupied location |
insertRay | Insert ray from laser scan observation |
local2grid | Convert local coordinates to grid indices |
local2world | Convert local coordinates to world coordinates |
move | Move map in world frame |
occupancyMatrix | Convert occupancy grid to matrix |
raycast | Compute cell indices along a ray |
rayIntersection | Find intersection points of rays and occupied map cells |
setOccupancy | Set occupancy value of locations |
show | Display binary occupancy map |
syncWith | Sync map with overlapping map |
world2grid | Convert world coordinates to grid indices |
world2local | Convert world coordinates to local coordinates |
Beispiele
Erstellen Sie eine leere Karte im Format 10 x 10m.
map = binaryOccupancyMap(10,10,10);
Belegung weltweiter Standorte festlegen und Karte anzeigen.
x = [1.2; 2.3; 3.4; 4.5; 5.6]; y = [5.0; 4.0; 3.0; 2.0; 1.0]; setOccupancy(map, [x y], ones(5,1)) figure show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_01_de.png)
Erhöhen Sie die Anzahl besetzter Standorte um einen bestimmten Radius.
inflate(map, 0.5) figure show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_02_de.png)
Erhalten Sie Rasterstandorte von Standorten weltweit.
ij = world2grid(map, [x y]);
Legen Sie Rasterpositionen auf freie Positionen fest.
setOccupancy(map, ij, zeros(5,1), 'grid')
figure
show(map)![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_03_de.png)
Dieses Beispiel zeigt, wie ein Bild zur Verwendung bei der Kartenerstellung und Pfadplanung in ein binäres Belegungsraster konvertiert wird.
Bild importieren.
image = imread('imageMap.png');Konvertieren Sie das Bild basierend auf dem angegebenen Schwellenwert in Graustufen und dann in Schwarzweiß.
grayimage = rgb2gray(image); bwimage = grayimage < 0.5;
Verwenden Sie ein Schwarzweißbild als Matrixeingabe für das binäre Belegungsraster.
grid = binaryOccupancyMap(bwimage); show(grid)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](imagetobinaryoccupancygridexampleexample_01_de.png)
Dieses Beispiel zeigt, wie eine .pgm-Datei in ein binaryOccupancyMap-Objekt zur Verwendung in MATLAB konvertiert wird.
Bild mit imread importieren. Das Bild ist recht groß und sollte auf den relevanten Bereich zugeschnitten werden.
image = imread('playpen_map.pgm');
imageCropped = image(750:1250,750:1250);
imshow(imageCropped)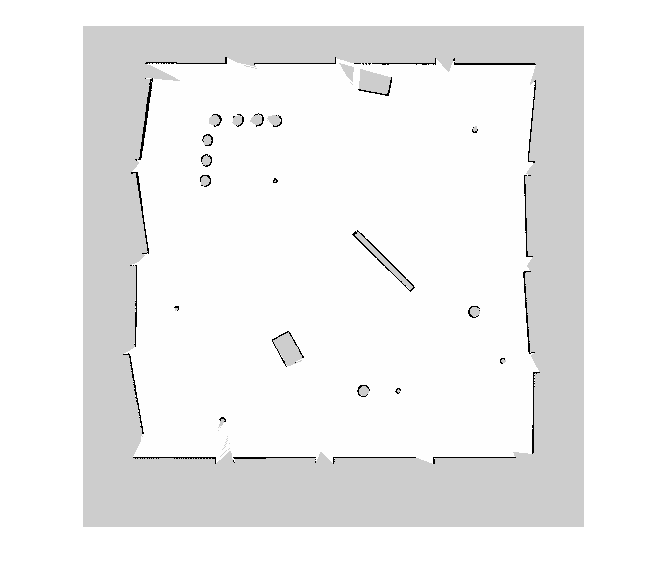
Unbekannte Bereiche (grau) sollten entfernt und als freier Speicherplatz behandelt werden. Erstellen Sie eine logische Matrix basierend auf einem Schwellenwert. Dieser Wert kann je nach Bild unterschiedlich sein. Der belegte Speicherplatz sollte auf 1 (weiß im Bild) gesetzt werden.
imageBW = imageCropped < 100; imshow(imageBW)
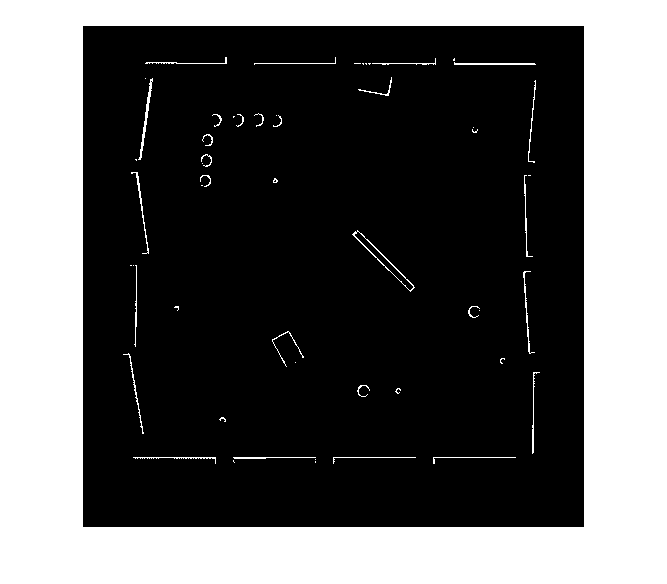
Erstellen Sie ein binaryOccupancyMap-Objekt mithilfe des angepassten Kartenbildes.
map = binaryOccupancyMap(imageBW); show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](convertpgmimagetomapexample_03_de.png)