n4sid
Estimate state-space model using subspace method with time-domain or frequency-domain data
Syntax
Description
Estimate State-Space Model
sys = n4sid(tt,nx)sys of order
nx using all the input and output signals in the timetable
tt.
sys is a model of the following form:
A, B, C,
D, and K are state-space matrices.
u(t) is the input,
y(t) is the output,
e(t) is the disturbance, and
x(t) is the vector of nx
states.
All entries of A, B, C, and
K are free estimable parameters by default. For dynamic systems,
D is fixed to zero by default, meaning that the system has no
feedthrough. For static systems (nx = 0), D is an
estimable parameter by default.
You can use this syntax for SISO and MISO systems. The function assumes that the last
variable in the timetable is the single output signal. You can also use this syntax to
estimate a time-series model if tt contains a single variable that
represents the sole output.
For MIMO systems and for timetables that contain more variables than you plan to use
for estimation, you must also use name-value arguments to specify the names of the input
and output channels you want. For more information, see tt.
To estimate a continuous-time model, set 'Ts' to
0 using name-value syntax.
sys = n4sid(data,nx)data. Use this syntax especially when you want to estimate a
state-space model using frequency-domain or frequency-response data, or when you want to
take advantage of the additional information, such as data sample time or experiment
labeling, that data objects provide.
Specify Additional Options
sys = n4sid(___,Name,Value)'Ts' as 0. Use the 'Form',
'Feedthrough', and 'DisturbanceModel'
name-value pair arguments to modify the default behavior of the A,
B, C, D, and
K matrices.
You can use this syntax with any of the previous input-argument combinations.
Examples
Estimate a state-space model and compare its response with the measured output.
Load the input-output data tt1, which is stored in a timetable.
load sdata1.mat tt1
Estimate a fourth-order state-space model.
nx = 4; sys = n4sid(tt1,nx)
sys =
Discrete-time identified state-space model:
x(t+Ts) = A x(t) + B u(t) + K e(t)
y(t) = C x(t) + D u(t) + e(t)
A =
x1 x2 x3 x4
x1 0.8392 0.3129 -0.02105 0.03743
x2 -0.4768 0.6671 0.1428 -0.003757
x3 0.01951 0.08374 -0.09761 -1.046
x4 -0.003885 0.02914 0.8796 -0.03171
B =
u
x1 0.02635
x2 0.03301
x3 -7.256e-05
x4 0.0005861
C =
x1 x2 x3 x4
y 69.08 -26.64 2.237 -0.5601
D =
u
y 0
K =
y
x1 0.003282
x2 -0.009339
x3 0.003232
x4 0.003809
Sample time: 0.1 seconds
Parameterization:
FREE form (all coefficients in A, B, C free).
Feedthrough: none
Disturbance component: estimate
Number of free coefficients: 28
Use "idssdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using N4SID on time domain data "tt1".
Fit to estimation data: 76.33% (prediction focus)
FPE: 1.21, MSE: 1.087
Model Properties
Compare the simulated model response with the measured output.
compare(tt1,sys)
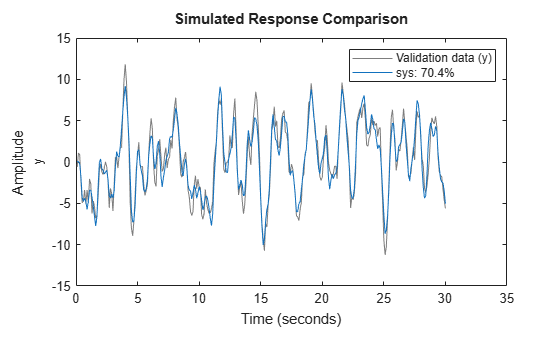
The plot shows that the fit percentage between the simulated model and the estimation data is greater than 70%.
You can view more information about the estimation by exploring the idss property sys.Report.
sys.Report
ans =
Status: 'Estimated using N4SID with prediction focus'
Method: 'N4SID'
InitialState: 'estimate'
N4Weight: 'CVA'
N4Horizon: [6 10 10]
Fit: [1×1 struct]
Parameters: [1×1 struct]
OptionsUsed: [1×1 idoptions.n4sid]
RandState: [1×1 struct]
DataUsed: [1×1 struct]
For example, find out more information about the estimated initial state.
sys.Report.Parameters.X0
ans = 4×1
-0.0085
-0.0052
0.0193
0.0282
Load the input/output data umat1 and ymat1,
which are numeric matrices, as well as the sample time Ts.
load sdata1 umat1 ymat1 Ts
Determine the optimal model order by specifying argument nx as a
range from 1 to 10.
nx = 1:10;
sys = n4sid(umat1,ymat1,nx,'Ts',Ts);An automatically generated plot shows the Hankel singular values for models of the
orders specified by nx.
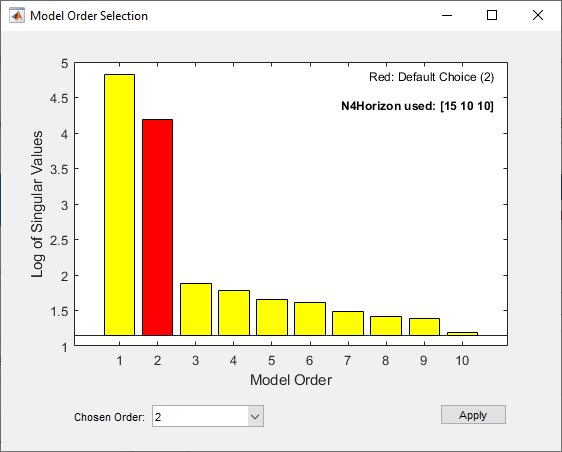
States with relatively small Hankel singular values can be safely discarded. The
suggested default order choice is 2.
Select the model order in the Chosen Order list and click Apply.
Load estimation data.
load iddata2 z2
Specify estimation options. Set the weighting scheme 'N4Weight' to 'SSARX' and estimation-status display option 'Display' to 'on'.
opt = n4sidOptions('N4Weight','SSARX','Display','on')
Option set for the n4sid command:
InitialState: 'estimate'
N4Weight: 'SSARX'
N4Horizon: 'auto'
Display: 'on'
InputOffset: []
OutputOffset: []
EstimateCovariance: 1
OutputWeight: []
Focus: 'prediction'
WeightingFilter: []
EnforceStability: 0
Advanced: [1×1 struct]
Description of options
Estimate a third-order state-space model using the updated option set.
nx = 3; sys = n4sid(z2,nx,opt);
Modify the canonical form of the A, B, and C matrices, include a feedthrough term in the D matrix, and eliminate disturbance-model estimation in the K matrix.
Load input-output data and estimate a fourth-order system using the n4sid default options.
load sdata1 tt1 sys1 = n4sid(tt1,4);
Specify the modal form and compare the A matrix with the default A matrix.
sys2 = n4sid(tt1,4,'Form','modal'); A1 = sys1.A
A1 = 4×4
0.8392 0.3129 -0.0211 0.0374
-0.4768 0.6671 0.1428 -0.0038
0.0195 0.0837 -0.0976 -1.0462
-0.0039 0.0291 0.8796 -0.0317
A2 = sys2.A
A2 = 4×4
0.7554 0.3779 0 0
-0.3779 0.7554 0 0
0 0 -0.0669 0.9542
0 0 -0.9542 -0.0669
Include a feedthrough term and compare the D matrices.
sys3 = n4sid(tt1,4,'Feedthrough',1);
D1 = sys1.DD1 = 0
D3 = sys3.D
D3 = 0.0487
Eliminate disturbance modeling and compare the K matrices.
sys4 = n4sid(tt1,4,'DisturbanceModel','none'); K1 = sys1.K
K1 = 4×1
0.0033
-0.0093
0.0032
0.0038
K4 = sys4.K
K4 = 4×1
0
0
0
0
Estimate a continuous-time canonical-form model.
Load estimation data.
load iddata1 z1
Estimate the model. Set Ts to 0 to specify a continuous model.
nx = 2; sys = n4sid(z1,nx,'Ts',0,'Form','canonical');
sys is a second-order continuous-time state-space model in the canonical form.
Estimate a state-space model from closed-loop data using the subspace algorithm SSARX. This algorithm is better at capturing feedback effects than other weighting algorithms.
Generate closed-loop estimation data for a second-order system corrupted by white noise.
N = 1000; K = 0.5; rng('default'); w = randn(N,1); z = zeros(N,1); u = zeros(N,1); y = zeros(N,1); e = randn(N,1); v = filter([1 0.5],[1 1.5 0.7],e); for k = 3:N u(k-2) = -K*y(k-2) + w(k-2); u(k-1) = -K*y(k-1) + w(k-1); z(k) = 1.5*z(k-1) - 0.7*z(k-2) + u(k-1) + 0.5*u(k-2); y(k) = z(k) + 0.8*v(k); end dat = iddata(y, u, 1);
Specify the weighting scheme 'N4weight' used by the N4SID algorithm. Create two option sets. For one option set, set 'N4weight' to 'CVA'. For the other option set, set the 'N4weight' to 'SSARX'.
optCVA = n4sidOptions('N4weight','CVA'); optSSARX = n4sidOptions('N4weight','SSARX');
Estimate state-space models using the option sets.
sysCVA = n4sid(dat,2,optCVA); sysSSARX = n4sid(dat,2,optSSARX);
Compare the fit of the two models with the estimation data.
compare(dat,sysCVA,sysSSARX);
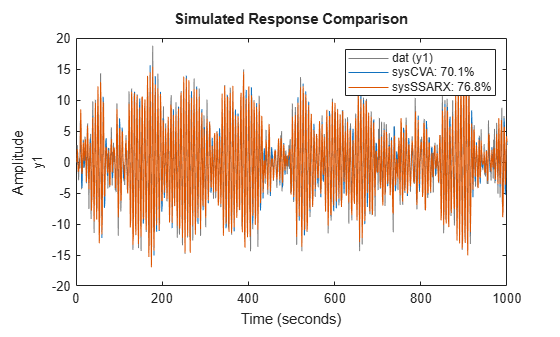
As the plot shows, the model estimated using the SSARX algorithm produces a better fit than the model estimated using the CVA algorithm.
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Ljung, L. System Identification: Theory for the User, Appendix 4A, Second Edition, pp. 132–134. Upper Saddle River, NJ: Prentice Hall PTR, 1999.
[2] van Overschee, P., and B. De Moor. Subspace Identification of Linear Systems: Theory, Implementation, Applications. Springer Publishing: 1996.
[3] Verhaegen, M. "Identification of the deterministic part of MIMO state space models." Automatica, 1994, Vol. 30, pp. 61–74.
[4] Larimore, W.E. "Canonical variate analysis in identification, filtering and adaptive control." Proceedings of the 29th IEEE Conference on Decision and Control, 1990, pp. 596–604.
[5] McKelvey, T., H. Akcay, and L. Ljung. "Subspace-based multivariable system identification from frequency response data." IEEE Transactions on Automatic Control, 1996, Vol. 41, pp. 960–979.