Estimate State-Space Model
Estimate state-space model using time or frequency data in the Live Editor
Description
The Estimate State-Space Model task lets you interactively estimate and validate a state-space model using time or frequency data. You can define and vary the model structure and specify optional parameters, such as initial condition handling and search method. The task automatically generates MATLAB® code for your live script. For more information about Live Editor tasks generally, see Add Interactive Tasks to a Live Script.
State-space models are models that use state variables to describe a system by a set of first-order differential or difference equations, rather than by one or more nth-order differential or difference equations. State variables can be reconstructed from the measured input-output data, but are not themselves measured during the experiment.
The state-space model structure is a good choice for quick estimation because, apart from the estimation data, the model requires you to specify only one parameter, the model order. For more information about state-space estimation, see What Are State-Space Models?
The Estimate State-Space Model task is independent of the more general System Identification app. Use the System Identification app when you want to compute and compare estimates for multiple model structures.
To get started, load experiment data that contains input and output data into your MATLAB workspace and then import that data into the task. Then specify a model structure to estimate. The task provides configuration controls and plotted results that help you experiment with different model parameters and compare how well the output of each model you specify fits the input/output measurements.
Open the Task
To add the Estimate State-Space Model task to a live script in the MATLAB Editor:
On the Live Editor tab, select Task > Estimate State-Space Model.
In a code block in your script, type a relevant keyword, such as
state,space, orestimate. SelectEstimate State Space Modelfrom the suggested command completions.
Examples
Use the Estimate State-Space Model Live Editor Task to estimate a state-space model and compare the model output to the measurement data.
Set Up Data
Load the measurement data tt1 into your MATLAB workspace. tt1 is a timetable that contains one input variable u and one output variable y.
load sdata1 tt1
Import Data into the Task
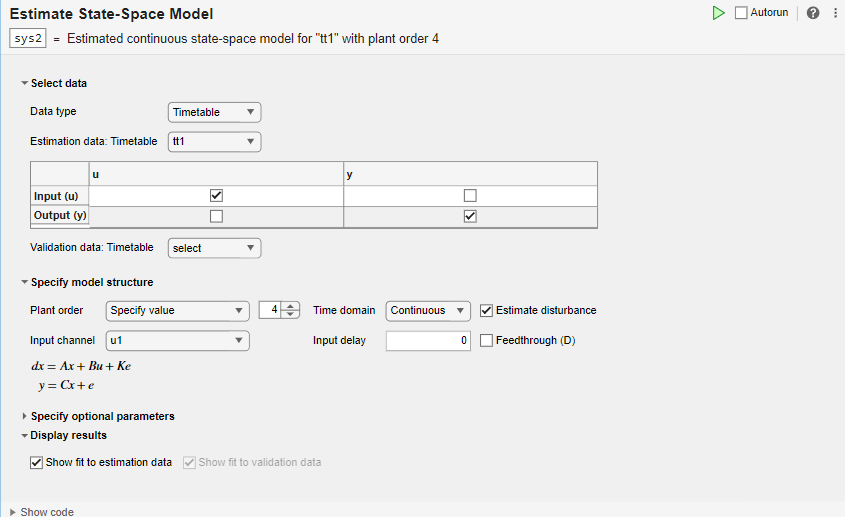
In the Select data section, set Data Type to Timetable and set Estimation data to tt11.

The task displays a table that contains the tt1 input and output variable names.
Estimate the Model Using Default Settings
Examine the model structure and optional parameters.

In the Specify model structure section, the plant order is set to its default value of 4 and the model is in the continuous-time domain. Equations below the parameters in this section display the specified structure.
In the Specify optional parameters section, parameters display the default options for state-space estimation.
Execute the task from the Live Editor tab by clicking the green arrow. You can also select Autorun to run the task automatically every time you update a parameter.
![]()
A plot displays the estimation data, the estimated model output, and the fit percentage.

Experiment with Parameter Settings
Experiment with the parameter settings and see how they influence the fit.
For instance, in Specify model structure, the Estimate disturbance box is selected, so the disturbance matrix K is present in the equations. If you clear the box, the K term disappears. Run the updated configuration, and see how the fit changes.

 s
s
Change the Plant Order setting to Pick best value in range. The default setting is 1:10.

When you run the model, a Model Order Selection plot displays the contribution of each state to the model dynamic behavior. With the initial task settings for the other parameters, the plot displays a recommendation of 2 for the model order.

Accept this recommendation by clicking Apply, and see how this change affects the fit.

Generate Code
To display the code that the task generates, click ![]() at the bottom of the parameter section. The code that you see reflects the current parameter configuration of the task.
at the bottom of the parameter section. The code that you see reflects the current parameter configuration of the task.

Use separate estimation and validation data so that you can validate the estimated state-space model.
Set Up Data
Load the measurement data umat1 and ymat1 into your MATLAB workspace and examine its contents. Also load the sample time Ts.
load sdata1.mat umat1 ymat1 Ts
Split the data into two sets, with one half for estimation and one half for validation. The original data set has 300 samples, so each new data set has 150 samples.
u_est = umat1(1:150); u_val = umat1(151:300); y_est = ymat1(1:150); y_val = ymat1(151:300); Ts
Ts = 0.1000
Import Data into Task
In the Select data section, set Data type to Numeric. Set Sample time to the value of Ts, which is 0.1 seconds. Select the appropriate data sets for estimation and validation.

Estimate and Validate Model
The example Estimate State-Space Model with Live Editor Task recommends a model order of 2. Use that value for Plant Order. Leave other parameters at their default values. Note that Input Channel refers not to the input data set, but to the channel index within the input data set, which for a single-input system is always u1.

Execute the task from the Live Editor tab using Run. Executing the task creates two plots. The first plot shows the estimation results and the second plot shows the validation results.

The fit to the estimation data is somewhat worse than in Estimate State-Space Model with Live Editor Task. Estimation in the current example has only half the data with which to estimate the model. The fit to the validation data for this example is better than the fit to the estimation data.