dsp.SineWave
Generate discrete sine wave
Description
The dsp.SineWave
System object™ generates a real or complex, multichannel sinusoidal signal with independent
amplitude, frequency, and phase in each output channel.
For both real and complex sinusoids, the Amplitude, Frequency, and PhaseOffset properties can be scalars or length-N vectors, where N is the number of channels in the output. When you specify at least one of these properties as a length-N vector, scalar values specified for the other properties are applied to each of the N channels.
The dsp.SineWave object and the sin function both generate a discrete sine wave signal. However, the object can
process large streams of real-time data and handle system states automatically. The function
performs one-time computations on data that is readily available and cannot handle system
states. For a comparison between the two, see System Objects vs MATLAB Functions.
To generate a discrete-time sinusoidal signal:
Create the
dsp.SineWaveobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
sine = dsp.SineWave
sine = dsp.SineWave(PropertyName,Value)
Example: sine = dsp.SineWave('Amplitude',2);
sine = dsp.SineWave(amp,freq,phase,PropertyName,Value)amp, Frequency property set to freq,
PhaseOffset property set to phase,
and any other specified properties set to the specified values.
Properties
Usage
Syntax
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
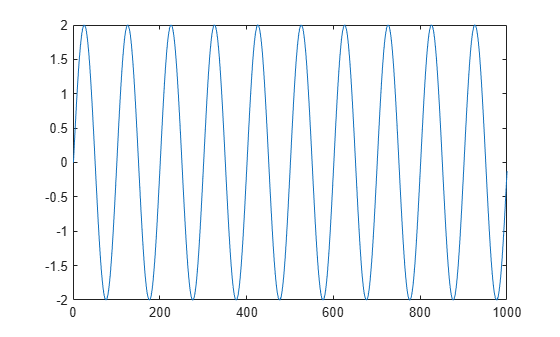
Generate a sine wave with an amplitude of 2, frequency of 10 Hz, and an initial phase of 0.
sine1 = dsp.SineWave(2,10); sine1.SamplesPerFrame = 1000; y = sine1(); plot(y)
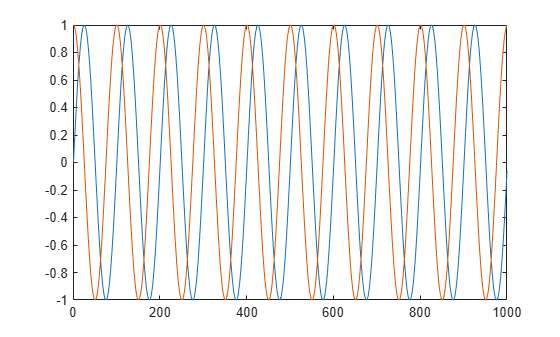
Generate two sine waves offset by a phase of pi/2 radians.
sine2 = dsp.SineWave; sine2.Frequency = 10; sine2.PhaseOffset = [0 pi/2]; sine2.SamplesPerFrame = 1000; y = sine2(); plot(y)
This example shows how to lowpass filter a noisy signal in MATLAB® and visualize the original and filtered signals using a spectrum analyzer. For a Simulink® version of this example, see Filter Frames of a Noisy Sine Wave Signal in Simulink.
Specify Signal Source
The input signal is the sum of two sine waves with frequencies of 1 kHz and 10 kHz. The sampling frequency is 44.1 kHz.
Sine1 = dsp.SineWave('Frequency',1e3,'SampleRate',44.1e3); Sine2 = dsp.SineWave('Frequency',10e3,'SampleRate',44.1e3);
Create Lowpass Filter
The lowpass FIR filter, dsp.LowpassFilter, designs a minimum-order FIR lowpass filter using the generalized Remez FIR filter design algorithm. Set the passband frequency to 5000 Hz and the stopband frequency to 8000 Hz. The passband ripple is 0.1 dB and the stopband attenuation is 80 dB.
FIRLowPass = dsp.LowpassFilter('PassbandFrequency',5000,... 'StopbandFrequency',8000);
Create Spectrum Analyzer
Set up the spectrum analyzer to compare the power spectra of the original and filtered signals. The spectrum units are dBm.
SpecAna = spectrumAnalyzer('PlotAsTwoSidedSpectrum',false,... 'SampleRate',Sine1.SampleRate,... 'ShowLegend',true, ... 'YLimits',[-145,45]); SpecAna.ChannelNames = {'Original noisy signal',... 'Lowpass filtered signal'};
Specify Samples per Frame
This example uses frame-based processing, where data is processed one frame at a time. Each frame of data contains sequential samples from an independent channel. Frame-based processing is advantageous for many signal processing applications because you can process multiple samples at once. By buffering your data into frames and processing multisample frames of data, you can improve the computational time of your signal processing algorithms. Set the number of samples per frame to 4000.
Sine1.SamplesPerFrame = 4000; Sine2.SamplesPerFrame = 4000;
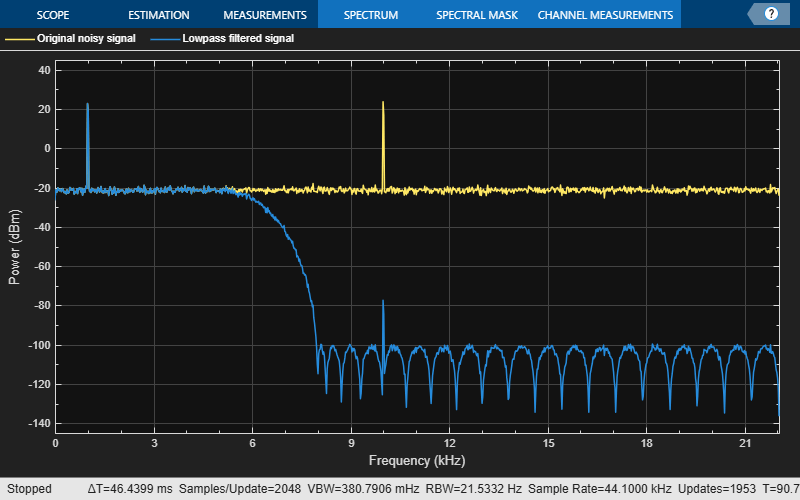
Filter the Noisy Sine Wave Signal
Add zero-mean white Gaussian noise with a standard deviation of 0.1 to the sum of sine waves. Filter the result using the FIR filter. While running the simulation, the spectrum analyzer shows that frequencies above 8000 Hz in the source signal are attenuated. The resulting signal maintains the peak at 1 kHz because it falls in the passband of the lowpass filter.
for i = 1 : 1000 x = Sine1()+Sine2()+0.1.*randn(Sine1.SamplesPerFrame,1); y = FIRLowPass(x); SpecAna(x,y); end release(SpecAna)
Bandpass filter a discrete-time sine wave signal which consists of three sinusoids at frequencies, 1 kHz, 10 kHz, and 15 kHz.
Design an FIR Equiripple bandpass filter by first creating a bandpass filter design specifications object, and then designing a filter using these specifications.
Design Bandpass Filter
Create a bandpass filter design specifications object using fdesign.bandpass.
bandpassSpecs = fdesign.bandpass('Fst1,Fp1,Fp2,Fst2,Ast1,Ap,Ast2', ... 1/4,3/8,5/8,6/8,60,1,60);
List the available design methods for this object.
designmethods(bandpassSpecs)
Design Methods for class fdesign.bandpass (Fst1,Fp1,Fp2,Fst2,Ast1,Ap,Ast2): butter cheby1 cheby2 ellip equiripple kaiserwin
To design an Equiripple filter, pick 'equiripple'.
bpFilter = design(bandpassSpecs,'equiripple',Systemobject=true)bpFilter =
dsp.FIRFilter with properties:
Structure: 'Direct form'
NumeratorSource: 'Property'
Numerator: [-0.0043 -3.0812e-15 0.0136 3.7820e-15 -0.0180 -4.2321e-15 7.1634e-04 4.0993e-15 0.0373 -4.1057e-15 -0.0579 3.7505e-15 0.0078 -3.4246e-15 0.1244 2.4753e-15 -0.2737 -8.6287e-16 0.3396 -8.6287e-16 -0.2737 2.4753e-15 … ] (1×37 double)
InitialConditions: 0
Show all properties
Visualize the frequency response of the designed filter.
freqz(bpFilter,[],44100)

Create Sinusoidal Signal
Create a signal that is a sum of three sinusoids with frequencies at 1 kHz, 10 kHz, and 15 kHz. Initialize spectrum analyzer to view the original signal and the filtered signal.
Sine1 = dsp.SineWave(Frequency=1e3,SampleRate=44.1e3,SamplesPerFrame=4000); Sine2 = dsp.SineWave(Frequency=10e3,SampleRate=44.1e3,SamplesPerFrame=4000); Sine3 = dsp.SineWave(Frequency=15e3,SampleRate=44.1e3,SamplesPerFrame=4000); SpecAna = spectrumAnalyzer(PlotAsTwoSidedSpectrum=false, ... SampleRate=Sine1.SampleRate, ... ShowLegend=true, ... YLimits=[-240,45]); SpecAna.ChannelNames = {'Original noisy signal','Bandpass filtered signal'};
Filter Sinusoidal Signal
Filter the sinusoidal signal using the bandpass filter that has been designed. View the original signal and the filtered signal in the spectrum analyzer. The tone at 1 kHz is filtered out and attenuated. The tone at 10 kHz is unaffected, and the tone at 15 kHz is mildly attenuated because it appears in the transition band of the filter.
for i = 1:5000 x = Sine1()+Sine2()+Sine3(); y = bpFilter(x); SpecAna(x,y); end release(SpecAna)
