Modellierung von Regelungssystemen mit Modellobjekten
Modellobjekte können einzelne Komponenten einer Regelungsarchitektur darstellen, z. B. die Regelstrecke, Aktoren, Sensoren oder Regler. Sie können Modellobjekte verbinden, um aggregierte Modelle von Blockdiagrammen zu erstellen, die die kombinierte Antwort von mehreren Elementen darstellen.
Das folgende Regelsystem enthält beispielsweise einen Vorfilter F, eine Regelstrecke G und einen Regler C, die alle in einer einschleifigen Konfiguration angeordnet sind. Das Modell umfasst zudem eine Darstellung der Sensordynamik S.
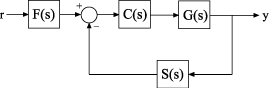
Sie können jede der Komponenten als ein Modellobjekt darstellen. Sie müssen nicht für jede Komponente den gleichen Typ von Modellobjekt verwenden. Stellen Sie beispielsweise die Regelstrecke G als Null-Polstellen-Verstärkungsmodell (zpk) mit einem Doppelpol bei s = -1, C als PID-Regler sowie F und S als Transferfunktionen dar:
G = zpk([],[-1,-1],1); C = pid(2,1.3,0.3,0.5); S = tf(5,[1 4]); F = tf(1,[1 1]);
Sie können diese Elemente dann zu Modellen kombinieren, die Ihr Regelungssystem oder das Regelungssystem als Ganzes darstellen. Erstellen Sie zum Beispiel die Antwort des offenen Regelkreises SGC:
open_loop = S*G*C;
Zum Erstellen eines Modells der ungefilterten Antwort des geschlossenen Regelkreises verwenden Sie den Befehl feedback:
T = feedback(G*C,S);
Zur Modellierung der gesamten Systemantwort im geschlossenen Regelkreis von r bis y wird T mit der Transferfunktion des Filters kombiniert:
Try = T*F;
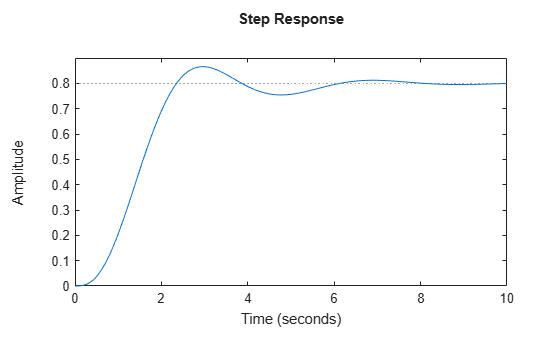
Die Ergebnisse open_loop, T und Try sind ebenfalls lineare Modellobjekte. Sie können sie mit Control System Toolbox™-Befehlen für den Entwurf und die Analyse von Regelungen bearbeiten. Stellen Sie zum Beispiel die Sprungantwort des gesamten Systems dar:
stepplot(Try)
Wenn Sie numerische LTI-Modelle kombinieren, stellt das resultierende numerische LTI-Modell das Gesamtsystem dar. Das resultierende Modell enthält nicht die ursprünglichen Daten der kombinierten Komponenten. So verfolgt T beispielsweise nicht gesondert die Dynamik der Komponenten G, C und S, die zur Erstellung von T kombiniert werden.