lsiminfo
Compute linear response characteristics
Syntax
Description
lsiminfo lets you compute linear response characteristics
from an array of response data [y,t]. For a linear response
y(t), lsiminfo computes
characteristics relative to yinit and
yfinal, where
yinit is the initial offset, that is, the value
before the input is applied, and yfinal is the
steady-state value of the response.
lsiminfo uses yinit = 0 and
yfinal = last sample value of
y(t) unless you explicitly specify these
values.
The function returns the characteristics in a structure containing the fields:
TransientTime— The first time T such that the error |y(t) – yfinal| ≤ SettlingTimeThreshold × emax for t ≥ T, where emax is the maximum error |y(t) – yfinal| for t ≥ 0.By default, SettlingTimeThreshold = 0.02 (2% of the peak error). Transient time measures how quickly the transient dynamics die off.
SettlingTime— The first time T such that |y(t) – yfinal| ≤ SettlingTimeThreshold × |yfinal – yinit| for t ≥ T.By default, settling time measures the time it takes for the error to stay below 2% of |yfinal – yinit|.
Peak— Peak value of |y(t) – yinit|. (since R2025a)PeakTime— Time at which the peak value occurs. (since R2025a)Min— Minimum value of y(t).MinTime— Time the response takes to reach the minimum value.Max— Maximum value of y(t).MaxTime— Time the response takes to reach the maximum value.
For complex responses, lsiminfo
computes characteristics based on the magnitudes of the complex values in
y, yinit, and
yfinal. (since R2025a)
S = lsiminfo(y,t)y and corresponding time vector t. This syntax
uses yinit = 0 and the last value in
y (or the last value in each channel's corresponding response data)
as yfinal to compute characteristics that depend
on these values.
For SISO system responses, y is a vector with the same number of
entries as t. For MIMO response data, y is an
array containing the responses of each I/O channel.
S = lsiminfo(y,t,yfinal)yfinal. This syntax is useful when you know that the expected
steady-state system response differs from the last value in y for reasons such as
measurement noise. This syntax uses yinit =
0.
For SISO responses, t and y are vectors with the
same length NS. For systems with NY outputs, you can
specify y as an NS-by-NY array
and yfinal as an NY-by-1 array.
lsiminfo then returns a NY-by-1
structure array S of response characteristics corresponding to each
output channel.
S = lsiminfo(y,t,yfinal,yinit)yinit. This syntax is useful when your y data
has an initial offset, that is, y is nonzero before the input is
applied.
For SISO responses, t and y are vectors with the
same length NS. For systems with NY outputs, you can
specify y as an NS-by-NY array
and yfinal and yinit as an
NY-by-1 arrays. lsiminfo then
returns a NY-by-1 structure array
S of response characteristics corresponding to each output
channel.
S = lsiminfo(___,'SettlingTimeThreshold',
lets you specify the threshold ST)ST used in definition of settling and
transient times. The default value is ST = 0.02 (2%). You can use this
syntax with any of the previous input-argument combinations.
Examples
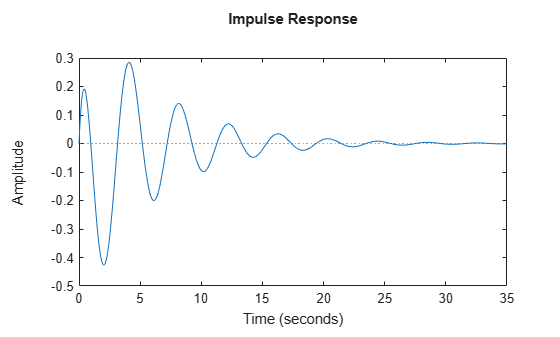
Create the following continuous-time transfer function:
sys = tf([1 -1],[1 2 3 4]);
Calculate the impulse response.
[y,t] = impulse(sys);
impulse returns the output response y and the time vector t used for simulation.
Compute the response characteristics using a final response value of 0.
s = lsiminfo(y,t,0)
s = struct with fields:
TransientTime: 22.8700
SettlingTime: NaN
Peak: 0.4268
PeakTime: 2.0088
Min: -0.4268
MinTime: 2.0088
Max: 0.2847
MaxTime: 4.0733
You can plot the impulse response and verify these response characteristics. For example, the time at which the minimum response value (MinTime) is reached is approximately 2 seconds.
impulse(sys)