comm.ConvolutionalEncoder
Convolutionally encode binary data
Description
The comm.ConvolutionalEncoder
System object™ encodes a sequence of binary input vectors to produce a sequence of binary
output vectors.
To convolutionally encode binary data:
Create the
comm.ConvolutionalEncoderobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
convencoder = comm.ConvolutionalEncoder
convencoder = comm.ConvolutionalEncoder(trellis)TrellisStructure property to trellis.
convencoder = comm.ConvolutionalEncoder(___,Name=Value)comm.ConvolutionalEncoder(TerminationMethod='Continuous') specifies
the termination method as continuous to retain the encoder states at the end of each input
vector for use with the next input vector.
Properties
Usage
Syntax
Description
codeword = convencoder(message)codeword is the encoded codeword.
message and codeword are column vectors of
numeric, logical, or unsigned fixed-point values with word length 1 (fi (Fixed-Point
Designer) object).
codeword = convencoder(message,initstate)TerminationMethod property to 'Truncated' and the
InitialStateInputPort property to 1
(true).
codeword = convencoder(message,resetstate)TerminationMethod property to 'Continuous' and the
ResetInputPort
property to 1 (true).
[
also returns the final state of the encoder. To enable this syntax, set the codeword,finalstate] = convencoder(message)FinalStateOutputPort property to 1
(true) and the TerminationMethod property to 'Continuous' or
'Truncated'.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Transmit a convolutionally encoded 8 differential phase shift keying (DPSK) modulated bit stream through an additive white Gaussian noise (AWGN) channel. Then, demodulate and decode the modulated bit stream using a Viterbi decoder.
Create the necessary System objects.
conEnc = comm.ConvolutionalEncoder; modDPSK = comm.DPSKModulator('BitInput',true); chan = comm.AWGNChannel('NoiseMethod','Signal to noise ratio (SNR)','SNR',10); demodDPSK = comm.DPSKDemodulator('BitOutput',true); vDec = comm.ViterbiDecoder('InputFormat','Hard'); error = comm.ErrorRate('ComputationDelay',3,'ReceiveDelay',34);
Process the data by following these steps.
Generate random bits.
Convolutionally encode the data.
Apply DPSK modulation.
Pass the modulated signal through an AWGN channel.
Demodulate the noisy signal.
Decode the data using a Viterbi algorithm.
Collect error statistics.
for counter = 1:20 data = randi([0 1],30,1); encodedData = conEnc(data); modSignal = modDPSK(encodedData); receivedSignal = chan(modSignal); demodSignal = demodDPSK(receivedSignal); receivedBits = vDec(demodSignal); errors = error(data,receivedBits); end
Display the number of errors.
errors(2)
ans = 3
Encode and decode a sequence of bits using a convolutional encoder and a Viterbi decoder with a defined puncture pattern. Verify that the input and output bits are identical.
Define a puncture pattern matrix, and then reshape it into vector form for use with the encoder and decoder System objects.
pPatternMat = [1 0 1;1 1 0]; pPatternVec = reshape(pPatternMat,6,1);
Create a convolutional encoder and a Viterbi decoder in which the puncture pattern is defined by pPatternVec.
conEnc = comm.ConvolutionalEncoder('PuncturePatternSource','Property','PuncturePattern',pPatternVec); viDec = comm.ViterbiDecoder('InputFormat','Hard','PuncturePatternSource','Property', ... 'PuncturePattern',pPatternVec);
Create an error rate counter with the appropriate receive delay.
error = comm.ErrorRate('ReceiveDelay',viDec.TracebackDepth);Encode a sequence of random bits, and then decode the encoded message.
dataIn = randi([0 1],600,1); dataEncoded = conEnc(dataIn); dataOut = viDec(dataEncoded);
Verify that no errors exist in the output data.
errStats = error(dataIn,dataOut); errStats(2)
ans = 0
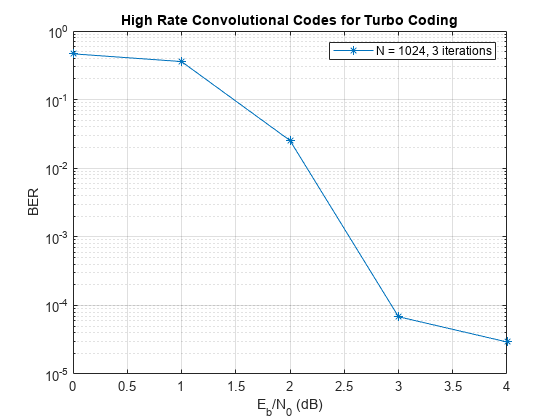
Concatenated convolutional codes offer high reliability and have gained in prominence and usage as turbo codes. The comm.TurboEncoder and comm.TurboDecoder System objects support rate 1/n convolutional codes only. This example shows the parallel concatenation of two rate 2/3 convolutional codes to achieve an effective rate 1/3 turbo code by using comm.ConvolutionalEncoder and comm.APPDecoder System objects.
System Parameters
blkLength = 1024; % Block length EbNo = 0:5; % Eb/No values to loop over numIter = 3; % Number of decoding iterations maxNumBlks = 1e2; % Maximum number of blocks per Eb/No value M = 2; % PSK-modulation order
Convolutional Encoder/Decoder Parameters
trellis = poly2trellis([5 4],[23 35 0; 0 5 13]); k = log2(trellis.numInputSymbols); % number of input bits n = log2(trellis.numOutputSymbols); % number of output bits intrIndices = randperm(blkLength/k)'; % Random interleaving decAlg = 'True App'; % Decoding algorithm
Initialize System Objects
Initialize convolutional encoding, APP Decoding, and error rate computation Systems objects. The demodulation output soft bits using a log-likelihood ratio method.
cEnc1 = comm.ConvolutionalEncoder( ... 'TrellisStructure',trellis, ... 'TerminationMethod','Truncated'); cEnc2 = comm.ConvolutionalEncoder( ... 'TrellisStructure',trellis, ... 'TerminationMethod','Truncated'); cAPPDec1 = comm.APPDecoder( ... 'TrellisStructure',trellis, ... 'TerminationMethod','Truncated', ... 'Algorithm',decAlg); cAPPDec2 = comm.APPDecoder( ... 'TrellisStructure',trellis, ... 'TerminationMethod','Truncated', ... 'Algorithm',decAlg); bitError = comm.ErrorRate; % BER measurement
Frame Processing Loop
Loop through a range of values to generate results for BER performance. The helperTurboEnc and helperTurboDec helper functions perform the turbo encoding and decoding.
ber = zeros(length(EbNo),1); bps = log2(M); turboEncRate = k/(2*n); SNRdB = convertSNR(EbNo,'ebno','snr', ... BitsPerSymbol=bps, ... CodingRate=turboEncRate); for ii = 1:length(EbNo) for numBlks = 1:maxNumBlks % Generate binary data data = randi([0 1],blkLength,1); % Turbo encode the data [encodedData,outIndices] = helperTurboEnc( ... data,cEnc1,cEnc2, ... trellis,blkLength,intrIndices); % Modulate the encoded data modSignal = pskmod(encodedData,M); % Pass the modulated signal through an AWGN channel [receivedSignal,nzVar] = awgn(modSignal,SNRdB(ii)); % Demodulate the noisy signal using LLR to output soft bits demodSignal = pskdemod(receivedSignal,M,OutputType='llr',NoiseVar=nzVar); % Turbo decode the demodulated data receivedBits = helperTurboDec( ... -demodSignal,cAPPDec1,cAPPDec2, ... trellis,blkLength,intrIndices,outIndices,numIter); % Calculate the error statistics errorStats = bitError(data,receivedBits); end ber(ii) = errorStats(1); reset(bitError); end
Display Results
While the practical wireless systems, such as LTE and CCSDS, specify base rate-1/n convolutional codes for turbo codes, the results show use of higher rate convolutional codes as turbo codes is viable.
figure; semilogy(EbNo, ber, '*-'); grid on; xlabel('E_b/N_0 (dB)'); ylabel('BER'); title('High Rate Convolutional Codes for Turbo Coding'); legend(['N =' num2str(blkLength) ', ' num2str(numIter) ' iterations']);
Helper Functions
function [yEnc,outIndices] = helperTurboEnc( ... data,hCEnc1,hCEnc2,trellis,blkLength,intrIndices) % Turbo encoding using two parallel convolutional encoders. % No tail bits handling and assumes no output stream puncturing. % Trellis parameters k = log2(trellis.numInputSymbols); n = log2(trellis.numOutputSymbols); cLen = blkLength*n/k; punctrVec = [0;0;0;0;0;0]; % assumes all streams are output N = length(find(punctrVec==0)); % Encode random data bits y1 = hCEnc1(data); y2 = hCEnc2( ... reshape(intrlv(reshape(data,k,[])',intrIndices)',[],1)); y1D = reshape(y1(1:cLen),n,[]); y2D = reshape(y2(1:cLen),n,[]); yDTemp = [y1D; y2D]; y = yDTemp(:); % Generate output indices vector using puncturing vector idx = 0 : 2*n : (blkLength - 1)*2*(n/k); punctrVecIdx = find(punctrVec==0); dIdx = repmat(idx, N, 1) + punctrVecIdx; outIndices = dIdx(:); yEnc = y(outIndices); end function yDec = helperTurboDec( ... yEnc,cAPPDec1,cAPPDec2,trellis, ... blkLength,intrIndices,inIndices,numIter) % Turbo decoding using two a-posteriori probability (APP) decoders % Trellis parameters k = log2(trellis.numInputSymbols); n = log2(trellis.numOutputSymbols); rCodLen = 2*(n/k)*blkLength; typeyEnc = class(yEnc); % Re-order encoded bits according to outIndices x = zeros(rCodLen,1); x(inIndices) = yEnc; % Generate output of first encoder yD = reshape(x(1:rCodLen),2*n,[]); lc1D = yD(1:n, :); Lc1_in = lc1D(:); % Generate output of second encoder lc2D = yD(n+1:2*n, :); Lc2_in = lc2D(:); % Initialize unencoded data input Lu1_in = zeros(blkLength,1,typeyEnc); % Turbo Decode out1 = zeros(blkLength/k,k,typeyEnc); for iterIdx = 1 : numIter [Lu1_out, ~] = cAPPDec1(Lu1_in,Lc1_in); tmp = Lu1_out(1:blkLength); Lu2_in = reshape(tmp,k,[])'; [Lu2_out, ~] = cAPPDec2( ... reshape(Lu2_in(intrIndices, :)',[],1),Lc2_in); out1(intrIndices, :) = reshape(Lu2_out(1:blkLength),k,[])'; Lu1_in = reshape(out1',[],1); end % Calculate llr and decoded bits for the final iteration llr = reshape(out1', [], 1) + Lu1_out(1:blkLength); yDec = cast((llr>=0), typeyEnc); end
More About
References
[1] Clark, George C., and J. Bibb Cain. Error-Correction Coding for Digital Communications. Applications of Communications Theory. New York: Plenum Press, 1981.
[2] Gitlin, Richard D., Jeremiah F. Hayes, and Stephen B. Weinstein. Data Communications Principles. Applications of Communications Theory. New York: Plenum Press, 1992.
[3] Yasuda, Y., K. Kashiki, and Y. Hirata. “High-Rate Punctured Convolutional Codes for Soft Decision Viterbi Decoding.” IEEE® Transactions on Communications 32, no. 3 (March 1984): 315–19. https://doi.org/10.1109/TCOM.1984.1096047.
[4] Haccoun, D., and G. Begin. “High-Rate Punctured Convolutional Codes for Viterbi and Sequential Decoding.” IEEE Transactions on Communications 37, no. 11 (November 1989): 1113–25. https://doi.org/10.1109/26.46505.
[5] Begin, G., D. Haccoun, and C. Paquin. “Further Results on High-Rate Punctured Convolutional Codes for Viterbi and Sequential Decoding.” IEEE Transactions on Communications 38, no. 11 (November 1990): 1922–28. https://doi.org/10.1109/26.61470.
[6] Moision, B. "A Truncation Depth Rule of Thumb for Convolutional Codes." In Information Theory and Applications Workshop (January 27 2008-February 1 2008, San Diego, California), 555-557. New York: IEEE, 2008.
Extended Capabilities
Version History
Introduced in R2012a