Mapped Motor
Mapped motor and drive electronics operating in torque-control mode
Libraries:
Powertrain Blockset /
Propulsion /
Electric Motors and Inverters
Vehicle Dynamics Blockset /
Powertrain /
Propulsion
Description
The Mapped Motor block implements a mapped motor and drive electronics operating in torque-control mode. The output torque tracks the torque reference demand while including a time constant for the combined motor and motor drive. Use the block for fast system-level simulations when you do not know detailed physical parameters of the motor, for example, for motor power and torque tradeoff studies. Depending on your needs, you can use maps having different levels of detail.
You can specify:
Port configuration — Input torque or motor shaft speed.
Electrical torque range — Parameterize by a torque-speed envelope, maximum motor power and torque, or a torque-speed-voltage envelope. If you have your own torque torque-speed-voltage envelope, you can directly import it.
Electrical loss — Parameterize by using either a single measured operating point, a measured loss table, or a measured efficiency table. If you have Model-Based Calibration Toolbox™, you can virtually calibrate the measured loss table. If you have your own calibration table, you can directly import it.
Wherever voltage is used in calibration tables, it refers to the DC voltage supplied to the motor drive electronics.
Electrical Torque
To specify the range of torque that the block allows, on the Electrical Torque tab, for Parameterized by, select one of these options.
| Setting | Block Implementation |
|---|---|
Tabulated torque-speed
envelope | Range specified as a set of shaft speed data points with corresponding maximum torque values. Minimum torque is set to the negative of maximum torque. |
Maximum torque and
power | Range specified using the maximum torque and maximum power values. |
Tabulated torque-speed-voltage
envelope | Range specified as a set of speed and supplied DC voltage data points with their corresponding maximum and minimum torque values. To directly import your own torque-limits calibration tables, click Import Torque Limits Calibration. |
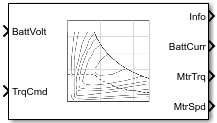
For any of these methods, the block implements a torque envelope similar
to the one in this figure. If Parameterized by is set to
Tabulated torque-speed-voltage envelope, the envelope
adds supplied DC voltage as a third axis.
Direct Import of Electrical Torque
If you have your own torque-speed-voltage envelope calibration, you can directly import it. This table steps through the tasks.
Task | Description |
|---|---|
Select parameterization | On the Electrical Torque tab, set
Parameterized by to |
Select electrical torque calibration data file | Navigate to the calibration data file folder, for example,
Select the calibration data file, for example,
Click Open. |
Import torque limits data | Click Import Torque Limits Calibration. The block reads and imports the data in the spreadsheet MaxTorque and MinTorque tabs. |
Electrical Losses
To specify the electrical losses, on the Electrical Losses tab, for Parameterize losses by, select one of these options.
| Setting | Block Implementation |
|---|---|
Single efficiency measurement | Efficiency calculated using three loss terms. One term is constant, and measured at zero speed and torque:
Two terms depend on operating conditions. The block determines their coefficients from the efficiency η0 measured at an efficiency setpoint, where motor torque is τ0 and motor speed is ω0:
|
Tabulated loss data | Loss calibration lookup table that is a function of motor speed and load torque. If you have Model-Based Calibration Toolbox, click Calibrate Maps to virtually calibrate the 2-D lookup table using measured data. |
Tabulated loss data with temperature | Loss calibration lookup table that is a function of motor speed, load torque, and operating temperature. If you have Model-Based Calibration Toolbox, click Calibrate Maps to virtually calibrate the 3-D lookup table using measured data. |
Tabulated loss data with temperature and
voltage | Loss calibration lookup table that is a function of load torque, motor speed, supplied DC voltage, and operating temperature. To directly import your own 4-D loss calibration table, click Import Loss Calibration. |
Tabulated efficiency data | 2-D efficiency calibration lookup table that is a function of motor speed and load torque. The block:
|
Tabulated efficiency data with
temperature | 3-D efficiency calibration lookup table that is a function of motor speed, load torque, and operating temperature. The block:
|
Tabulated efficiency data with temperature and
voltage | Efficiency calibration lookup table that is a function of load torque, motor speed, supplied DC voltage, and operating temperature. To directly import your own 4-D efficiency calibration table, click Import Efficiency Calibration. The block:
|
As a best practice, use Tabulated loss data,
Tabulated loss data with temperature, or Tabulated
loss data with temperature and voltage instead of Tabulated
efficiency data, Tabulated efficiency data with
temperature, or Tabulated efficiency data with temperature and
voltage:
Efficiency becomes ill-defined for zero speed or zero torque.
You can account for fixed losses that are still present for zero speed or torque.
Note
Due to losses, the motor drive system can draw a current when the motor torque is zero.
Virtual Calibration of Electrical Losses
If you have Model-Based Calibration Toolbox, you can virtually calibrate a 2-D or 3-D measured loss lookup table.
On the Electrical Losses tab, set Parameterize losses by to either:
Tabulated loss dataTabulated loss data with temperature
Click Calibrate Maps.
The dialog box steps through these tasks.
Task | Description | ||||||
|---|---|---|---|---|---|---|---|
Import loss data | Import loss data from a file, for example, open
For more information, see Working with Data in the Model Browser (Model-Based Calibration Toolbox).
Collect motor data at steady-state operating conditions. Data should cover the motor speed, torque, and temperature operating range. To filter or edit the data, select Edit in Application. The Model-Based Calibration Toolbox Data Editor opens. | ||||||
Generate response models | Model-Based Calibration Toolbox uses test plans to fit data to Gaussian process models (GPMs). To assess or adjust the response model fit, select Edit in Application. The Model-Based Calibration Toolbox Model Browser opens. For more information, see Model Assessment (Model-Based Calibration Toolbox). | ||||||
Generate calibration | Model-Based Calibration Toolbox calibrates the response model and generates the calibrated table. To assess or adjust the calibration, select Edit in Application. The Model-Based Calibration Toolbox CAGE Browser opens. For more information, see Calibration Lookup Tables (Model-Based Calibration Toolbox). | ||||||
Update block parameters | Update these parameters with the calibration.
|
Direct Import of Electrical Losses
If you have your own loss calibration versus torque, speed, supplied DC voltage, and temperature, you can directly import it. This table steps through the tasks.
Task | Description |
|---|---|
Select parameterization | On the Electrical Losses tab, set
Parameterize losses by to
|
Select calibration data file | Navigate to the calibration data file folder, for example,
Select the calibration data file, for example,
Click Open. |
Import loss data | Click Import Loss Calibration. The block reads and imports the data in the spreadsheet PowerLoss tab. |
Direct Import of Electrical Efficiency
If you have your own efficiency calibration versus torque, speed, supplied DC voltage, and temperature, you can directly import it. This table steps through the tasks.
Task | Description |
|---|---|
Select parameterization | On the Electrical Losses tab, set
Parameterize losses by to
|
Select calibration data file | Navigate to the calibration data file folder, for
example,
Select the calibration data file, for
example,
Click Open. |
Import efficiency data | Click Import Efficiency Calibration. The block reads and imports the data in the spreadsheet Efficiency tab. |
Battery Current
The block calculates the battery current using the mechanical power, power loss, and battery voltage. Positive current indicates battery discharge. Negative current indicates battery charge.
The equation uses these variables.
| BattVolt | DC voltage into motor drive electronics |
| MechPwr | Mechanical power |
| PwrLoss | Power loss |
| BattCurr | DC current into motor drive electronics |
Power Accounting
For power accounting, the block implements these equations.
| Bus Signal | Description | Definition | Units | ||
|---|---|---|---|---|---|
|
|
| Mechanical power | Port configuration setting:
| W |
PwrBus | Electrical power | W | |||
| PwrLoss | Motor power loss — includes electrical and mechanical losses | W | ||
| PwrStoredShft | Rotor kinetic energy storage rate | W | ||
The equations use these variables.
| Te | Motor torque applied to shaft, assuming constant rotor speed |
| Tload | Motor torque load |
| ω | Rotor speed |
| b | Rotational damping coefficient |
J | Rotor inertia |
| Pd | Damping loss separate from any in loss table |
| Ploss,total | Total losses to heat, equal to
PwrNotTrnsfrd |
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2017aSee Also
Flux-Based PMSM | Induction Motor | Interior PMSM | Surface Mount PMSM