satellite
Add satellites to satellite scenario
Syntax
Description
satellite(
adds a scenario,semimajoraxis,eccentricity,inclination,RAAN,argofperiapsis,trueanomaly)Satellite object from
Keplerian elements defined in the Geocentric Celestial Reference Frame
(GCRF) to the satellite scenario.
satellite(
adds a scenario,positiontable)Satellite object from
position data specified in positiontable (timetable
object) to the scenario. This function creates a Satellite with
OrbitPropagator="ephemeris".
satellite(
adds a scenario,positiontable,velocitytable)Satellite object from
position data specified in positiontable (timetable
object) and velocity data specified in velocitytable
(timetable object) to the scenario. This function creates a Satellite with
OrbitPropagator="ephemeris".
satellite(
adds a scenario,positiontimeseries)Satellite object from
position data specified in positiontimeseries to the
scenario. This function creates a Satellite with
OrbitPropagator="ephemeris".
satellite(
adds a scenario,positiontimeseries,velocitytimeseries)Satellite object to the
scenario from position (in meters) data specified in
positiontimeseries (timeseries object) and
velocity (in meters/second) data specified in velocitytimeseries
(timeseries object). This function creates a Satellite with
OrbitPropagator="ephemeris".
satellite(___,
specifies options using one or more name-value arguments in addition to any input argument
combination from previous syntaxes. Name,Value)
sat = satellite(___)
Note
When the AutoSimulate property of the satelliteScenario is
false, you can modify the satellite only when the
SimulationStatus is NotStarted. You can use the
restart function to
reset SimulationStatus to NotStarted, but doing
so erases the simulation data.
Examples
Create a satellite scenario object.
sc = satelliteScenario;
Load the satellite ephemeris timetable in the Earth Centered Earth Fixed (ECEF) coordinate frame.
load("timetableSatelliteTrajectory.mat","positionTT","velocityTT");
Add four satellites to the scenario.
sat = satellite(sc,positionTT,velocityTT,"CoordinateFrame","ecef");
Visualize the trajectories of the satellites.
play(sc);

Create a satellite scenario and add ground stations from latitudes and longitudes.
startTime = datetime(2020,5,1,11,36,0); stopTime = startTime + days(1); sampleTime = 60; sc = satelliteScenario(startTime,stopTime,sampleTime); lat = 10; lon = -30; gs = groundStation(sc,lat,lon);
Add satellites using Keplerian elements.
semiMajorAxis = 10000000;
eccentricity = 0;
inclination = 10;
rightAscensionOfAscendingNode = 0;
argumentOfPeriapsis = 0;
trueAnomaly = 0;
sat = satellite(sc,semiMajorAxis,eccentricity,inclination, ...
rightAscensionOfAscendingNode,argumentOfPeriapsis,trueAnomaly);Add access analysis to the scenario and obtain the table of intervals of access between the satellite and the ground station.
ac = access(sat,gs); intvls = accessIntervals(ac)
intvls=8×8 table
"Satellite 2" "Ground station 1" 1 01-May-2020 11:36:00 01-May-2020 12:04:00 1680 1 1
"Satellite 2" "Ground station 1" 2 01-May-2020 14:20:00 01-May-2020 15:11:00 3060 1 2
"Satellite 2" "Ground station 1" 3 01-May-2020 17:27:00 01-May-2020 18:18:00 3060 3 3
"Satellite 2" "Ground station 1" 4 01-May-2020 20:34:00 01-May-2020 21:25:00 3060 4 4
"Satellite 2" "Ground station 1" 5 01-May-2020 23:41:00 02-May-2020 00:31:00 3000 5 5
"Satellite 2" "Ground station 1" 6 02-May-2020 02:50:00 02-May-2020 03:39:00 2940 6 6
"Satellite 2" "Ground station 1" 7 02-May-2020 05:58:00 02-May-2020 06:47:00 2940 7 7
"Satellite 2" "Ground station 1" 8 02-May-2020 09:06:00 02-May-2020 09:56:00 3000 8 9
Play the scenario to visualize the ground stations.
play(sc)

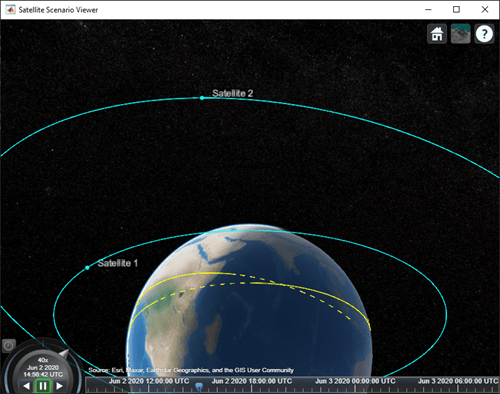
Create a satellite scenario with a start time of 02-June-2020 8:23:00 AM UTC, and the stop time set to one day later. Set the simulation sample time to 60 seconds.
startTime = datetime(2020,6,02,8,23,0); stopTime = startTime + days(1); sampleTime = 60; sc = satelliteScenario(startTime,stopTime,sampleTime);
Add two satellites to the scenario using their Keplerian elements.
semiMajorAxis = [10000000;15000000];
eccentricity = [0.01;0.02];
inclination = [0;10];
rightAscensionOfAscendingNode = [0;15];
argumentOfPeriapsis = [0;30];
trueAnomaly = [0;20];
sat = satellite(sc,semiMajorAxis,eccentricity,inclination, ...
rightAscensionOfAscendingNode,argumentOfPeriapsis,trueAnomaly)sat =
1x2 Satellite array with properties:
Name
ID
ConicalSensors
Gimbals
Transmitters
Receivers
Accesses
GroundTrack
Orbit
OrbitPropagator
MarkerColor
MarkerSize
ShowLabel
LabelFontColor
LabelFontSize
View the satellites in orbit and the ground tracks over one hour.
show(sat) groundTrack(sat,LeadTime=3600)
ans=1×2 object
1×1 GroundTrack 1×1 GroundTrack
Play the scenario and set the animation speed of the simulation to 40.
play(sc,PlaybackSpeedMultiplier=40)
Set up the satellite scenario.
startTime = datetime(2021,8,5);
stopTime = startTime + days(1);
sampleTime = 60; % seconds
sc = satelliteScenario(startTime,stopTime,sampleTime);Add satellites to the scenario from a SEM almanac file.
sat = satellite(sc,"gpsAlmanac.txt","OrbitPropagator","gps");
Visualize the GPS constellation.
v = satelliteScenarioViewer(sc);

Add a satellite to a satellite scenario from a Consultative Committee for Space Data Systems (CCSDS) Orbit Mean-Elements Message (OMM) file.
Create a satellite scenario. Use the epoch defined in the OMM file as the start time for the scenario (default behavior).
startTime = datetime(2020,5,10,0,0,0);
stopTime = startTime + days(1);
sampleTime = 60; % seconds
sc = satelliteScenario(startTime,stopTime,sampleTime);Add satellites from the OMM file eccentricOrbitSatellite.xml to the scenario sc. Use the default names provided in the OMM metadata.
sat1 = satellite(sc, "eccentricOrbitSatellite.xml")sat1 =
Satellite with properties:
Name: Satellite 41
ID: 1
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Orbit: [1x1 matlabshared.satellitescenario.Orbit]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
OrbitPropagator: sdp4
MarkerColor: [0.059 1 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Visual3DModel:
Visual3DModelScale: 1
Visualize the satellite.
v = satelliteScenarioViewer(sc);
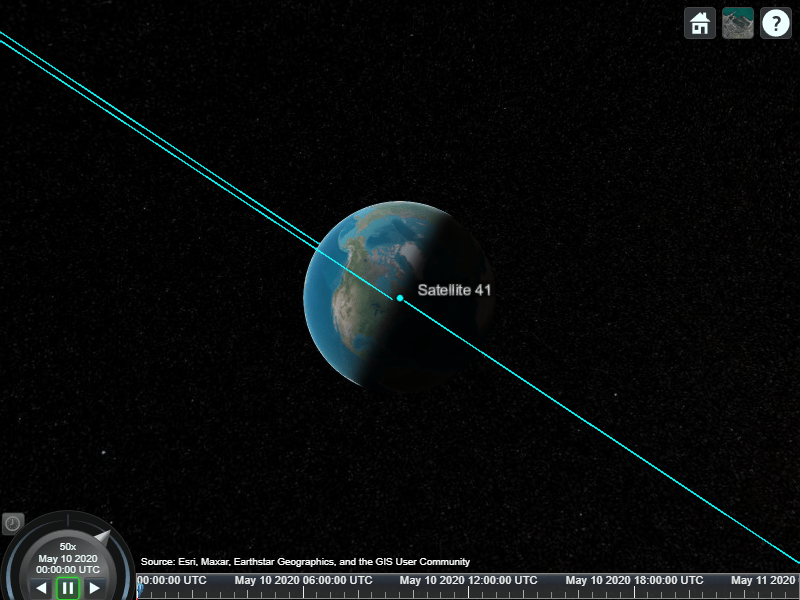
Play the scenario.
play(sc);