fieldOfView
Visualize field of view of conical sensor
Description
fieldOfView( adds a sensor)FieldOfView object to the
specified conical sensor, and draws contours on the Earth. Each contour represents the field
of view of a conical sensor in sensor based on the current state of the
scenario.
Locations inside the contour are inside the field of view. The field of view contours
are drawn on all open satellite scenario viewers. The contours are the lines of intersection
of the surface of the earth and the field of view cone. The half angle of the field of view
cone equals the MaxViewAngle property of the conical sensor, and the axis of the
cone is the z-axis (or boresight) of the conical sensor. The vertex of
the cone is located at the position of the conical sensor. The cone becomes wider along the
positive body z-axis of the conical sensor.
fieldOfView(
specifies options by using one or more name-value arguments.sensor,Name,Value)
fov = fieldOfView(___)
Examples
Create a satellite scenario with a start time of 15-June-2021 8:55:00 AM UTC and a stop time of five days later. Set the simulation sample time to 60 seconds.
startTime = datetime(2021,6,21,8,55,0);
stopTime = startTime + days(5);
sampleTime = 60; % seconds
sc = satelliteScenario(startTime,stopTime,sampleTime)sc =
satelliteScenario with properties:
StartTime: 21-Jun-2021 08:55:00
StopTime: 26-Jun-2021 08:55:00
SampleTime: 60
AutoSimulate: 1
Satellites: [1×0 matlabshared.satellitescenario.Satellite]
GroundStations: [1×0 matlabshared.satellitescenario.GroundStation]
Platforms: [1×0 matlabshared.satellitescenario.Platform]
Viewers: [0×0 matlabshared.satellitescenario.Viewer]
AutoShow: 1
Add a satellite to the scenario using Keplerian orbital elements.
semiMajorAxis = 7878137; % meters eccentricity = 0; inclination = 50; % degrees rightAscensionOfAscendingNode = 0; % degrees argumentOfPeriapsis = 0; % degrees trueAnomaly = 50; % degrees sat = satellite(sc,semiMajorAxis,eccentricity,inclination,rightAscensionOfAscendingNode, ... argumentOfPeriapsis,trueAnomaly)
sat =
Satellite with properties:
Name: Satellite 1
ID: 1
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Orbit: [1x1 matlabshared.satellitescenario.Orbit]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
OrbitPropagator: sgp4
MarkerColor: [0.059 1 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Visual3DModel:
Visual3DModelScale: 1
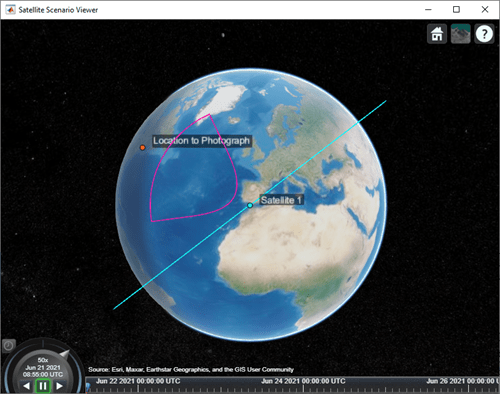
Add a ground station, which represents the location to be photographed, to the scenario.
gs = groundStation(sc,Name="Location to Photograph", ... Latitude=42.3001,Longitude=-71.3504) % degrees
gs =
GroundStation with properties:
Name: Location to Photograph
ID: 2
Latitude: 42.3001 degrees
Longitude: -71.3504 degrees
Altitude: 0 meters
MinElevationAngle: 0 degrees
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
MarkerColor: [1 0.4118 0.1608]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Add a gimbal to the satellite. You can steer this gimbal independently of the satellite.
g = gimbal(sat)
g =
Gimbal with properties:
Name: Gimbal 3
ID: 3
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Track the location to be photographed using the gimbal.
pointAt(g,gs);
Add a conical sensor to the gimbal. This sensor represents the camera. Set the field of view to 60 degrees.
camSensor = conicalSensor(g,MaxViewAngle=60)
camSensor =
ConicalSensor with properties:
Name: Conical sensor 4
ID: 4
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
MaxViewAngle: 60 degrees
Accesses: [1x0 matlabshared.satellitescenario.Access]
FieldOfView: [0x0 matlabshared.satellitescenario.FieldOfView]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Add access analysis to the conical sensor between the camera and the location to be photographed.
ac = access(camSensor,gs)
ac =
Access with properties:
Sequence: [4 2]
LineWidth: 3
LineColor: [0.3922 0.8314 0.0745]
Visualize the field of view of the camera by using the Satellite Scenario Viewer.
v = satelliteScenarioViewer(sc); fieldOfView(camSensor);
Determine the intervals during which the camera can see the geographical site.
t = accessIntervals(ac)
t=35×8 table
"Conical sensor 4" "Location to Photograph" 1 21-Jun-2021 10:38:00 21-Jun-2021 10:55:00 1020 1 2
"Conical sensor 4" "Location to Photograph" 2 21-Jun-2021 12:36:00 21-Jun-2021 12:58:00 1320 2 3
"Conical sensor 4" "Location to Photograph" 3 21-Jun-2021 14:37:00 21-Jun-2021 15:01:00 1440 3 4
"Conical sensor 4" "Location to Photograph" 4 21-Jun-2021 16:41:00 21-Jun-2021 17:04:00 1380 5 5
"Conical sensor 4" "Location to Photograph" 5 21-Jun-2021 18:44:00 21-Jun-2021 19:07:00 1380 6 6
"Conical sensor 4" "Location to Photograph" 6 21-Jun-2021 20:46:00 21-Jun-2021 21:08:00 1320 7 7
"Conical sensor 4" "Location to Photograph" 7 21-Jun-2021 22:50:00 21-Jun-2021 23:04:00 840 8 8
"Conical sensor 4" "Location to Photograph" 8 22-Jun-2021 09:51:00 22-Jun-2021 10:02:00 660 13 13
"Conical sensor 4" "Location to Photograph" 9 22-Jun-2021 11:46:00 22-Jun-2021 12:07:00 1260 14 15
"Conical sensor 4" "Location to Photograph" 10 22-Jun-2021 13:46:00 22-Jun-2021 14:10:00 1440 15 16
"Conical sensor 4" "Location to Photograph" 11 22-Jun-2021 15:49:00 22-Jun-2021 16:13:00 1440 16 17
"Conical sensor 4" "Location to Photograph" 12 22-Jun-2021 17:53:00 22-Jun-2021 18:16:00 1380 18 18
"Conical sensor 4" "Location to Photograph" 13 22-Jun-2021 19:55:00 22-Jun-2021 20:18:00 1380 19 19
"Conical sensor 4" "Location to Photograph" 14 22-Jun-2021 21:58:00 22-Jun-2021 22:16:00 1080 20 20
⋮
Calculate the maximum revisit time in hours.
startTimes = t.StartTime;
endTimes = t.EndTime;
revisitTimes = hours(startTimes(2:end) - endTimes(1:end-1));
maxRevisitTime = max(revisitTimes) % hoursmaxRevisitTime = 12.666666666666666
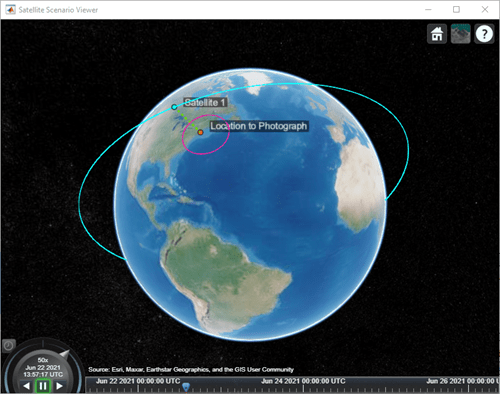
Visualize the revisit times that the camera photographs of the location.
play(sc);
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: 'LineWidth',2.5 sets the line width of the field of view to
2.5 pixels.
Satellite scenario viewer, specified as a scalar, vector, or array of satelliteScenarioViewer objects. If the AutoSimulate property of the scenario is false,
adding a satellite to the scenario disables any previously available timeline and
playback widgets.
Number of contour points used to draw the contour of the field of view, specified as an integer greater than or equal to 4.
Data Types: double
Visual width of the field of view contour in pixels, specified as a scalar in the range (0 10].
The line width cannot be thinner than the width of a pixel. If you set the line width to a value that is less than the width of a pixel on your system, the line displays as one pixel wide.
Color of field of view contour, specified as an RGB triplet, hexadecimal color code, a color name, or a short name.
For a custom color, specify an RGB triplet or a hexadecimal color code.
An RGB triplet is a three-element row vector whose elements specify the intensities of the red, green, and blue components of the color. The intensities must be in the range
[0,1], for example,[0.4 0.6 0.7].A hexadecimal color code is a string scalar or character vector that starts with a hash symbol (
#) followed by three or six hexadecimal digits, which can range from0toF. The values are not case sensitive. Therefore, the color codes"#FF8800","#ff8800","#F80", and"#f80"are equivalent.
Alternatively, you can specify some common colors by name. This table lists the named color options, the equivalent RGB triplets, and the hexadecimal color codes.
| Color Name | Short Name | RGB Triplet | Hexadecimal Color Code | Appearance |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan"
| "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|
"none" | Not applicable | Not applicable | Not applicable | No color |
This table lists the default color palettes for plots in the light and dark themes.
| Palette | Palette Colors |
|---|---|
Before R2025a: Most plots use these colors by default. |
|
|
|
You can get the RGB triplets and hexadecimal color codes for these palettes using the orderedcolors and rgb2hex functions. For example, get the RGB triplets for the "gem" palette and convert them to hexadecimal color codes.
RGB = orderedcolors("gem");
H = rgb2hex(RGB);Before R2023b: Get the RGB triplets using RGB =
get(groot,"FactoryAxesColorOrder").
Before R2024a: Get the hexadecimal color codes using H =
compose("#%02X%02X%02X",round(RGB*255)).
Example: 'blue'
Example: [0 0 1]
Example: '#0000FF'
Output Arguments
Version History
Introduced in R2021a