Using a Digital Twin to Predict the Real-Time Performance of a Drilling Rig
By Weston Johnson, Ph.D., Renoir Consulting LLC
Modern drilling rigs are highly complex systems: Hydraulic, pneumatic, electrical, mechanical, and thermal systems and subsystems must all be choreographed to keep a rig operational. Considering their complexity and scale, these behemoths are a marvel of modern manufacturing and controls design. But bringing a new design online and certifying its capabilities is not for the faint of heart—and, as with any new product, there is no “final” design. Even a certified design is only temporary, as customers rightly ask for customization and technology continues to improve.
One of our clients, Helmerich & Payne, Inc. (H&P), a global leader in rig design and management, wanted to know if they could pretest a specific rig change without having to schedule a working rig and crew. Simply put, could the testing and certification process be simplified and shortened?
The strategic market issue was this: If H&P’s customer wanted to alter a rig based on economic considerations, the regional availability of a key component, or weather and temperature conditions, could the rig be optimized to meet these needs while minimizing the design cycle? For my team, the key questions were: What effect does a single part play upon the whole? Is it possible to quickly redesign one aspect of a system while maintaining the balance of the whole system, and can the effect of that change be quantified?
What effect does a single part play upon the whole? Is it possible to quickly redesign one aspect of a system while maintaining the balance of the whole system?
Our solution was to develop a digital twin, a computer simulation that can accurately predict the real-time performance of a complex system.
A digital twin would enable H&P to measure the effect of a change to one part on the whole system and thereby determine how a regionally available motor or pump would affect the rest of the rig. It would also enable the client to predict how different motor types would affect drilling performance before they purchased a motor. This ability to quantify performance enhancement through simulation helped lead our client to replace the traditional random-wound motors with form-wound motors, which minimize mechanical vibration and improve reliability.
Capturing the Physical Properties of a Real-World System
Because the twin can recreate or model the fundamental physics of key devices, such as motors, long cable runs, and drive control algorithms, it can accurately predict the performance of the whole rig and identify the physical issue causing performance improvement, deviation, or failure.
The ability to replicate the physics of each device helps ensure that the twin is not a “black box” that simply recreates a particular output signal. Instead, physics-based twins describe the physical properties of devices (motors, pumps, bus parameters), including material properties, using mathematics and dynamic system analysis tools that capture the real-world responses of these devices.
In addition, by modeling the physics of each device, we can observe performance metrics that are not available in the real world. For example, physics-based twins can predict stress on a shaft, temperature gradients across a motor’s winding, or even changes in a motor’s inductance as it heats up, while simultaneously showing in (near) real time why the event may be occurring. These performance metrics allow the client to develop new products and test control scenarios without having to schedule a rig and crew, or to hire an external testing facility to test a hypothesis. This observability of rig physics makes the twin a powerful tool for lowering development costs and shortening design cycles.
The ability to replicate the physics of each real-world device helps ensure that the delivered twin is not a “black box” that simply recreates a particular output signal.
Example: Using a Digital Twin to Optimize Genset Selection
Creating a twin that precisely matches device performance takes not only experience in petroleum equipment and industrial processes but also the ability to mathematically describe the physics of those processes. Simulink® has a multitude of prebuilt modules for describing many types of devices, as well as advanced features, like automated control tuning, large library sets, and modular coding. These capabilities bring efficiency and accuracy to the process of modeling the physics of above-ground electromechanical systems and subsystems.
The ability to build a genset model and use it to determine the optimal genset size and configuration for a specific rig is a good example of the value these capabilities bring to the process. A genset is a combination of a diesel engine and an electric generator (Figure 1).

Figure 1. Genset diagram.
The genset unit provides the electrical power for all rig systems, including the drilling, draw works, and mud pump motors, and is thus an essential component of a modern electric rig. Typically, a rig will operate with three diesel gensets, but depending on the drilling site and geology, it might run more efficiently with just one large genset or as many as four smaller units. However, adding more gensets or increasing their size doesn’t necessarily improve performance. So how does the team decide which configuration will provide the best response while minimizing economic costs?
Every rig operator knows that if a pipe is dropped or a fault occurs, the bus voltage of a rig may spike and force a shutdown of the primary motor systems, but few could explain why dropping a pipe results in a voltage spike or what could be done to minimize its impact across a rig.
To answer these questions, detailed genset models are needed, but no two gensets are identical. Even small differences make it challenging to model parallel gensets—two or more gensets feeding into a common bus—because they result in different engine speeds and torque command signals for the automatic voltage regulator (AVR) and individual engine control systems (ECS). If these discrepancies are left unchecked in the physical device, then one generator could produce more voltage than another, resulting in currents that circulate between the gensets rather than supplying the rig’s loads. (This is a well-known issue that is commonly solved using a corrective control system known as reactive droop compensation.)
A genset twin built in Simulink can precisely model internal conditions of the engine, exciter, and generator and their respective control systems (Figure 2).
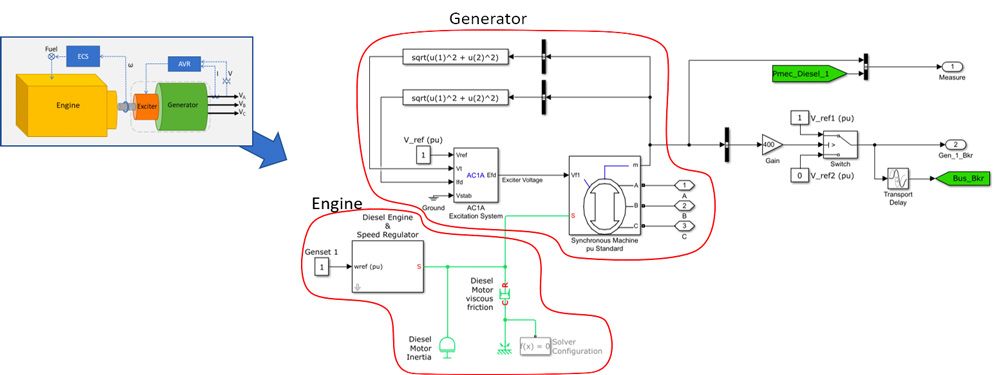
Figure 2. Genset subsystems modeled in Simulink.
With the right computational hardware, the twin can simultaneously model the exciter current and magnetic flux distribution in the generator field coils that induces an output voltage to meet the needs of the load. The twin can also replicate the control system governing the exciter current (accomplished in the real world by the AVR) and graphically show how the AVR modulates its parameters based on the exciter current, armature current, and reactive power.
More broadly, a physics-based twin can detail the systems’ response and, with technical experience, point to a solution to prevent the over-voltage from a pipe drop condition, as well as test numerous economic scenarios to determine the optimal number and power ratings for the gensets of a rig.
Creating models of each device with sufficient accuracy to allow the model to be called a “digital twin” generally involves three main steps: parameter estimation, optimization, and validation (Figure 3).

Figure 3. Twin development steps: estimation, optimization, and validation.
Validating a detailed twin model can be challenging because historical data may be missing or fractured. In these cases, it is often best to start with a simplified twin model that can be validated on a root component based on the historical data available. Once a simplified model is validated, performance details of each device obtained from OEMs can be added incrementally to achieve the desired model fidelity. In practice, and with practice, a digital twin (both system- and device-level) should be able to predict performance with an error less than 3–5% when compared with historical field data, for most industrial applications and devices.
Making It Possible
Twin development focused on the physics of certain electrical, electromechanical devices, and control processes for the above-ground power and control systems on a rig. By using a twin, engineers familiar with rig operation can expect the following results:
- Significant reduction in product development timelines and costs
- Expedited assessment of “what if” scenarios
- Strong support for root cause analysis of field issues
Twinning, even real-time twinning, is possible due the advanced computation power of modern hardware and software, like Simulink. With these innovative tools, costs and timelines for developing new rigs and rig products can be drastically reduced. As hardware and software continue to advance, it will be possible to capture ever greater detail and complexity in the digital twin.
Published 2019