Proceedings
Featured Presentations



Keynote: Technology Strategies for Next-Gen Vehicles
Plenary



Keynote: Technology Strategies for Next-Gen Vehicles


Panel Discussion: The Transformative Journey of Software-Defined Vehicles with Model-Based Design
Aaswad Kulkarni, Tata Consultancy Services
Sivakumar Uppaluri, Volvo
Bhanu Prakash Padiri, Continental

Panel Discussion: The Transformative Journey of Software-Defined Vehicles with Model-Based Design
Bhupesh Tekade, Renault Nissan Technology & Business Center India
Hariharan Lakshminarayanan, Stellantis
Dr. Manaswini Rath, KPIT Technologies
Gerd Winkler, Vitesco Technologies
Electrification

Developing EV Components Using Virtualization and Scaling to the Cloud
Sree Varshini Bhattu Saraswathi, MathWorks

Machine Learning and Cloud for EV System Development

Optimizing Electric Powertrain Performance Through System-Level Modeling


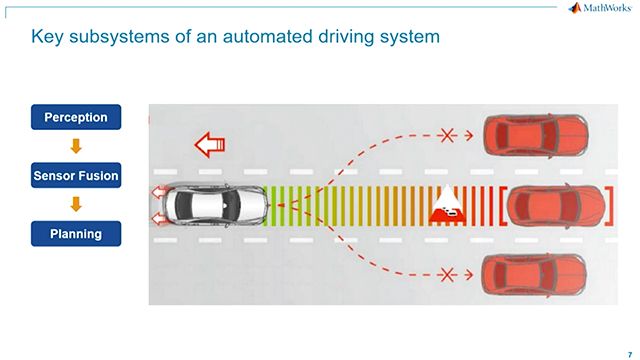
Automated Driving

Closed-Loop Testing of ADAS Systems Using dSPACE RTPC with MATLAB and Simulink
Dr. Rishu Gupta, MathWorks
Chandni S Vijay, Tata Elxsi
Hari Priyadarshini A., Tata Elxsi

Open Simulation Interface ASAM OSI Using RoadRunner for ADAS ECU Validation
Naga Pemmaraju, MathWorks

Scenario-Based Cosimulation of Autonomous Systems Using RoadRunner and CarMaker
Munish Raj, MathWorks
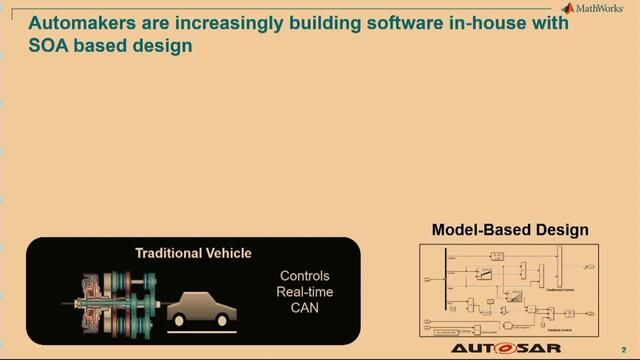
Software-Defined Vehicles

AI Use Cases in Powertrain Development
Jayanth Balaji Avanashilingam, MathWorks

Master Class: Accelerating Development for Software-Defined Vehicles Using CI/CD
Rajat Arora, MathWorks
Vamshi Kumbham, MathWorks


Predictive Maintenance as Vehicles Become More Software Defined
Aditya Jain, TCS
Koustubh Shirke, MathWorks