Grayscale Dilation
Morphological dilation of grayscale pixel data
Libraries:
Vision HDL Toolbox /
Morphological Operations
Description
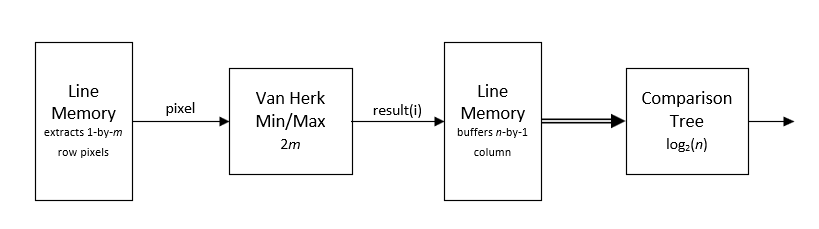
The Grayscale Dilation block performs morphological dilation on a stream of pixel intensity values. You can specify a neighborhood or structuring element of up to 32-by-32 pixels. For line, square, or rectangle structuring elements more than 8 pixels wide, the block uses the Van Herk algorithm to find the maximum pixel value. This algorithm uses only three comparators to find the maximums of all the rows, and then uses a comparison tree to find the maximum pixel value of the row results.
For structuring elements less than 8 pixels wide, or that contain zero elements, the block implements a pipelined comparison tree for each row of the neighborhood. An additional comparison tree finds the maximum pixel value of the row results. If the structuring element contains zeros that exclude pixels, the algorithm saves hardware resources by not implementing comparators for those pixel locations.
The opposite of a dilation operation is erosion. For the erosion operation, see the Grayscale Erosion block. For more information about morphological operations, see Types of Morphological Operations (Image Processing Toolbox).
Ports
This block uses a streaming pixel interface with a bus for
frame control signals. This interface enables the block to operate independently of image size
and format. The pixel ports on this block support single pixel streaming or
multipixel streaming. Single pixel streaming accepts and returns a single pixel value each clock
cycle. Multipixel streaming accepts and returns a vector of M pixels per
clock cycle to support high-frame-rate or high-resolution formats. The M
value corresponds to the Number of pixels parameter of the Frame
To Pixels block. Along with the pixel, the block accepts and returns a
pixelcontrol bus that contains five control signals. The control signals
indicate the validity of each pixel and their location in the frame. For multipixel streaming,
one set of control signals applies to all pixels in the vector. To convert a frame (pixel
matrix) into a serial pixel stream and control signals, use the Frame
To Pixels block. For a full description of the interface, see Streaming Pixel Interface.
Input
Output
Parameters
Tips
When you use a block with an internal line buffer inside an Enabled Subsystem (Simulink), the enable signal pattern must maintain the timing of the pixel stream, including the minimum blanking intervals. If the enable pattern corrupts the timing of the pixel stream, you might see partial output frames, corrupted pixel stream control signals, or mismatches between Simulink® and HDL simulation results. You may need to extend the blanking intervals to accommodate for cycles when the enable is low. For more information, see Configure Blanking Intervals.
Algorithms
The block pads the image with zeros for the dilation operation. For more information, see Edge Padding.
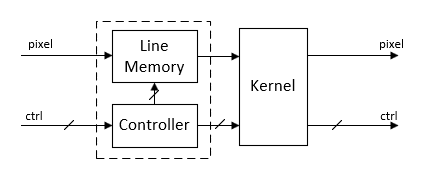
For line, square, or rectangle structuring elements more than 8 pixels wide, the block implements a Van Herk algorithm. All pixels in the structuring element must be set to one. The block decomposes the structuring element into rows and serially finds the maximum pixel value in each row by using the Van Herk algorithm. If the size of the input frame is not a multiple of m pixels, the line memory also adds horizontal padding to a multiple of m. This implementation uses only three comparators total for all rows. Then, if there is more than one row, it calculates the maximum pixel value of the row results by using a comparison tree. The diagram indicates the latency of each computation block.
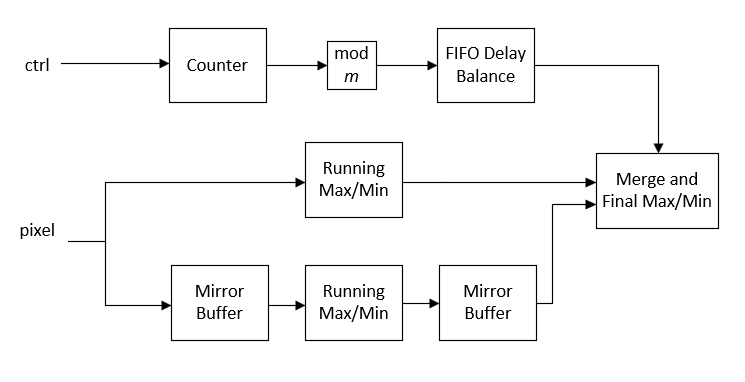
The Van Herk kernel computes a running forward maximum and a running backward maximum of the pixel values in each row of the neighborhood. For this computation, the pixels in the row must be buffered and the order reversed. The buffer adds latency relative to the comparison tree implementation. The Mirror Buffer is a ping-pong RAM of m pixels, where one memory reads values in reverse order while the other memory is writing. The kernel uses 3+n-1 comparators.
For structuring elements smaller than 8 pixels wide or with one or more pixels set to zero, the block implements a comparison tree.
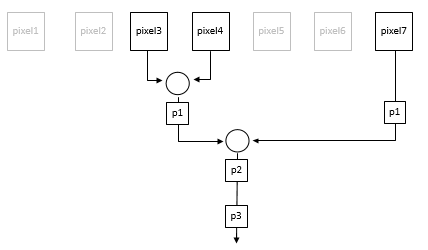
The diagram shows the architecture of the dilation operation. The algorithm finds the maximum pixel value of each row of the neighborhood in parallel. Then it calculates the maximum pixel value of the rows using another comparison tree. The diagram indicates the latency of each computation block.
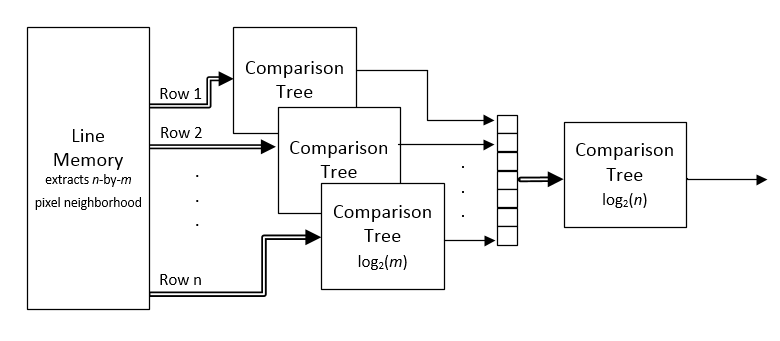
For a rectangular neighborhood that is m pixels wide, the first-stage comparison trees contain m – 1 comparators over log2(m) clock cycles. For instance, for a rectangular neighborhood that is 7 pixels wide, the comparison tree has six comparators over 3 clock cycles.
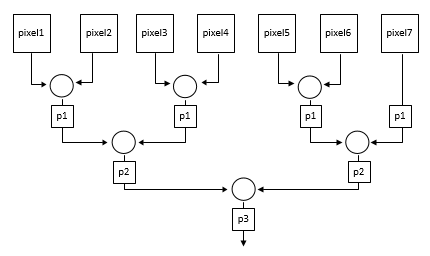
If the neighborhood that you specify contains zeroes, the generated HDL excludes
the comparator for the zero locations. The pipeline delay through the comparison
tree does not change. For instance, for a nonrectangular neighborhood with a row of
[0 0 1 1 0 0 1], the comparison tree for that row contains
two comparators and still uses 3 clock cycles.
The latency of the operation is the line buffer latency plus the latency of the kernel calculation. The line buffer latency includes edge padding.
The latency of a Van Herk kernel for a neighborhood of m-by-n pixels is 2m + log2(n). The block implements this kernel for line, square, or rectangle structuring elements more than 8 pixels wide, with no pixels set to zero.
The latency of a comparison tree kernel for a neighborhood of m-by-n pixels is log2(m)+log2(n). The block implements this kernel for structuring elements smaller than 8 pixels wide or with one or more pixels set to zero.
Note
When you use edge padding, use a horizontal blanking interval of at least twice the kernel width. This interval lets the algorithm finish processing one line before it starts processing the next one, including adding padding pixels before and after the active pixels in the line.
The horizontal blanking interval is equal to TotalPixelsPerLine – ActivePixelsPerLine or, equivalently, FrontPorch + BackPorch. Standard streaming video formats use a horizontal blanking interval of about 25% of the frame width. This interval is much larger than the filters applied to each frame.
The horizontal blanking interval must also meet these minimums:
If the kernel size is less than 4, and you use edge padding, the total porch must be at least 8 pixels.
When you disable edge padding, the horizontal blanking interval must be at least 12 cycles and is independent of the kernel size.
The BackPorch must be at least 6 pixels. This parameter is the number of inactive pixels before the first valid pixel in a frame.
For more information, see Configure Blanking Intervals.
Extended Capabilities
Version History
Introduced in R2016aSee Also
Dilation (Computer Vision Toolbox) | Grayscale Erosion | Frame To Pixels | visionhdl.GrayscaleDilation | imdilate (Image Processing Toolbox)
Topics
- Types of Morphological Operations (Image Processing Toolbox)
- Structuring Elements (Image Processing Toolbox)