Resettable Synchronous Subsystem
Represent resettable subsystem that has synchronous reset and enable behavior
Libraries:
HDL Coder /
HDL Subsystems
Description
The Resettable Synchronous Subsystem uses the State Control block in Synchronous mode with the Resettable Subsystem block. For subsystem blocks with state, the State Control block in Synchronous mode provides efficient reset and enable simulation behavior on hardware.
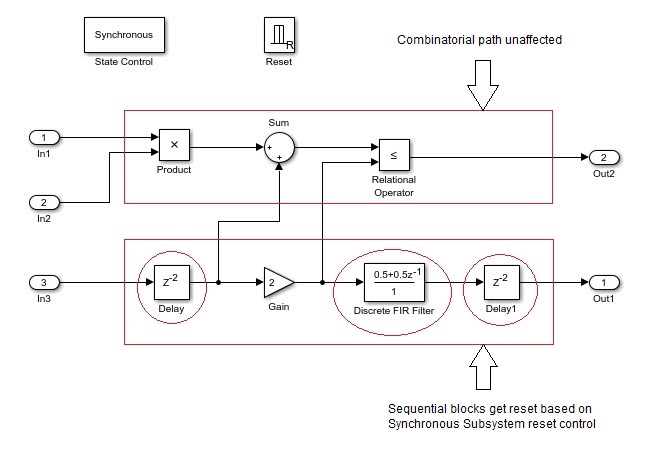
The reset port in the Resettable Synchronous Subsystem block
adds reset capability to blocks inside the subsystem that have state. This includes blocks
that need not have an external reset port capability, such as filters, Stateflow®
Chart, and MATLAB Function blocks. For HDL code generation, the
Reset trigger type of the Reset port is set to
level hold by default.
Ports
Input
See Inport for information on the data types accepted by a subsystem's input ports.
For more information, see Data Types Supported by Simulink in the Simulink® documentation.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | Boolean | fixed point | enumerated | bus
Output
See Outport for information on the data types output by a subsystem's output ports.
For more information, see Data Types Supported by Simulink in the Simulink documentation.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | Boolean | fixed point | enumerated | bus
Parameters
Select how to display port labels on the Synchronous Subsystem block icon.
noneDo not display port labels.
FromPortIconIf the corresponding port icon displays a signal name, display the signal name on the Subsystem block. Otherwise, display the port block name or the port number if the block name is a default name.
FromPortBlockNameDisplay the name of the corresponding port block on the Subsystem block.
SignalNameIf the signal connected to the port is named, display the name of the signal on the Subsystem block. Otherwise, display the name of the corresponding port block.
Programmatic Use
Parameter:
ShowPortLabels |
| Type: character vector |
Value: 'FromPortIcon' |
'FromPortBlockName' | 'SignalName' |
'none' |
Default:
'FromPortIcon' |
Control user access to the contents of the subsystem.
Settings
Default:
ReadWrite
ReadWriteEnables opening and modification of subsystem contents.
ReadOnlyEnables opening but not modification of the subsystem. If the subsystem resides in a block library, you can create and open links to the subsystem and can make and modify local copies of the subsystem but cannot change the permissions or modify the contents of the original library instance.
NoReadOrWriteDisables opening or modification of subsystem. If the subsystem resides in a library, you can create links to the subsystem in a model but cannot open, modify, change permissions, or create local copies of the subsystem.
Programmatic Use
Parameter:
Permissions |
| Type: character vector |
Value: 'ReadWrite' |
'ReadOnly' | 'NoReadOrWrite' |
Default:
'ReadWrite' |
Enter name of a function to be called if an error occurs while Simulink software is executing the subsystem.
Simulink software passes two arguments to the function: the handle of the subsystem and a character vector that specifies the error type. If no function is specified, Simulink software displays a generic error message if executing the subsystem causes an error.
Programmatic Use
Parameter:
ErrorFcn |
| Type: character vector |
Value: '' |
'<function name>' |
Default: '' |
Select whether to resolve names of workspace variables referenced by this subsystem.
For more information, see Symbol Resolution and Symbol Resolution Process.
AllResolve all names of workspace variables used by this subsystem, including those used to specify block parameter values and Simulink data objects (for example,
Simulink.Signalobjects).ExplicitOnlyResolve only names of workspace variables used to specify block parameter values, data store memory (where no block exists), signals, and states marked as “must resolve”.
NoneDo not resolve workspace variable names.
Programmatic Use
Parameter:
PermitHierarchicalResolution |
| Type: character vector |
Value: 'All' |
'ExplicitOnly' | 'None' |
Default: 'All' |
Select the code format to be generated for an atomic (nonvirtual) subsystem.
AutoSimulink Coder™ chooses the optimal format for you based on the type and number of instances of the subsystem that exist in the model.
InlineSimulink Coder inlines the subsystem unconditionally.
Nonreusable functionSimulink Coder software explicitly generates a separate function in a separate file. Subsystems with this setting generate functions that might have arguments depending on the Function interface parameter setting. You can name the generated function and file using parameters Function name and File name (no extension). These functions are not reentrant.
Reusable functionSimulink Coder software generates a function with arguments that allows reuse of subsystem code when a model includes multiple instances of the subsystem.
This option also generates a function with arguments that allows subsystem code to be reused in the generated code of a model reference hierarchy that includes multiple instances of a subsystem across referenced models. In this case, the subsystem must be in a library.
Programmatic Use
Parameter:
RTWSystemCode |
| Type: character vector |
Value: 'Auto' |
'Inline' | 'Nonreusable function' |
'Reusable function' |
Default: 'Auto' |
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
HDL Coder™ provides additional configuration options that affect HDL implementation and synthesized logic.
| Architecture | Description |
|---|---|
Module (default) | Generate code for the subsystem and the blocks within the subsystem. |
BlackBox | Generate a black box interface. The generated HDL code includes only the input/output port definitions for the subsystem. Therefore, you can use a subsystem in your model to generate an interface to existing, manually written HDL code. The black-box interface generation for subsystems is similar to the Model block interface generation without the clock signals. |
| Remove the subsystem from the generated code. You can use the subsystem in simulation, however, treat it as a “no-op” in the HDL code. |
For the BlackBox architecture, you
can customize port names and set attributes of the external component
interface. See Customize Black Box or HDL Cosimulation Interface.
| General | |
|---|---|
| AdaptivePipelining | Automatic pipeline insertion based on the synthesis tool, target frequency, and
multiplier word-lengths. The default is |
| ClockRatePipelining | Insert pipeline registers at a faster clock rate instead of the slower data rate. The
default is |
| ConstrainedOutputPipeline | Number of registers to place at
the outputs by moving existing delays within your design. Distributed
pipelining does not redistribute these registers. The default is
|
| DistributedPipelining | Pipeline register distribution,
or register retiming. The default is |
| FlattenHierarchy | Remove subsystem hierarchy from generated HDL code. The default
is |
| InputPipeline | Number of input pipeline stages
to insert in the generated code. Distributed pipelining and constrained
output pipelining can move these registers. The default is
|
| OutputPipeline | Number of output pipeline stages
to insert in the generated code. Distributed pipelining and constrained
output pipelining can move these registers. The default is
|
| SharingFactor | Number of functionally equivalent resources to map to a single shared resource. The default is 0. See also Resource Sharing. |
| StreamingFactor | Number of parallel data paths, or vectors, that are time multiplexed to transform into serial, scalar data paths. The default is 0, which implements fully parallel data paths. See also Streaming. |
| SynthesisAttributes |
Specifies the synthesis attributes for the blocks and block output signals in the model. The generated HDL code contains these attributes. For more information, see SynthesisAttributes. |
If this block is not the DUT, the block property settings in the Target
Specification tab are ignored. In the HDL Workflow Advisor, if you use the
IP Core Generation workflow, these target specification block
property values are saved with the model. If you specify these target specification block
property values using hdlset_param, when you open HDL Workflow Advisor,
the fields are populated with the corresponding values.
| Target Specification | |
|---|---|
| AdditionalTargetInterfaces |
Additional target interfaces, specified as a character vector. To save this block property on the model, in the Set Target Interface task of the IP Core Generation workflow, corresponding to the DUT ports that you want to add more interfaces, select Add more.... You can then add more interfaces in the Add New Target Interfaces dialog box. Specify the type of interface, number of additional interfaces, and a unique name for each additional interface. Values: Example:
|
| ProcessorFPGASynchronization | Processor/FPGA synchronization mode, specified as a character vector. To save this block property on the model, specify the Processor/FPGA Synchronization in the Set Target Interface task of the IP Core Generation workflow. Values: Example: |
| TestPointMapping | To save this block property on the model, specify the mapping of test point ports to target platform interfaces in the Set Target Interface task of the IP Core Generation workflow. Values: Example: |
| TunableParameterMapping | To save this block property on the model, specify the mapping of tunable parameter ports to target platform interfaces in the Set Target Interface task of the IP Core Generation workflow. Values: Example: |
| WriteRegisterReadback | To save this block property on the model, specify whether you want to enable readback on write registers such as AXI4 subordinate interface in the Generate RTL Code and IP Core task of the IP Core Generation workflow. To learn more, see Model Design for AXI4 Register Interface Generation. Values: |
| AXI4SubordinateIDWidth |
To save this block property on the model, specify the number of AXI manager interfaces that you want to connect the DUT IP core to by using the AXI4 Subordinate ID Width setting in the Generate RTL Code and IP Core task of the IP Core Generation workflow. To learn more, see Define Multiple AXI Master Interfaces in Reference Designs to Access DUT AXI4 Subordinate Interface. Values: |
| RegisterInterfaceReadPipeline |
To save this block property on the model, Specify the number of pipeline stages to insert in the read address decoder path by using the Register interface read pipeline setting in the Generate RTL Code and IP Core task of the IP Core Generation workflow. To learn more, see Model Design for AXI4 Register Interface Generation. Values: |
| GenerateDefaultRegisterInterface | To save this block property on the model, specify whether you want to disable generation of default register interfaces such as AXI4 subordinate interfaces in the Generate RTL Code and IP Core task of the IP Core Generation workflow. Values: |
| IPCoreAdditionalFiles | Verilog®, SystemVerilog, or VHDL® files for black boxes in your design. Specify the full path to each file, and separate file names with a semicolon (;). You can set this property in the HDL Workflow Advisor, in the Additional source files field. Values: Example: |
| IPCoreName | IP core name, specified as a character vector. You can set this property in the HDL Workflow Advisor, in the IP core name field. If this property is set to the default value, the HDL Workflow Advisor constructs the IP core name based on the name of the DUT. Values: Example: |
| IPCoreVersion | IP core version number, specified as a character vector. You can set this property in the HDL Workflow Advisor, in the IP core version field. If this property is set to the default value, the HDL Workflow Advisor sets the IP core version. Values: Example: |
| IPDataCaptureBufferSize |
FPGA Data Capture buffer size, specified as a character vector. Use FPGA Data Capture to observe signals in a design when running on an FPGA. The buffer size uses values that are 128*2^n, where n is an integer. By default, the buffer size is 128 (n=0). The maximum value of n is 13, which means that the maximum value for buffer size is 1048576 (=128*2^13). Values: Example: |
| IPCoreVendorName |
IP core vendor name, specified as a character vector. You can set this property in the HDL Workflow Advisor by entering a value in the IP core vendor name field. If this property is set to the default value, the HDL Workflow Advisor sets the vendor name to the domain name of your host machine. The vendor name must not start with a numeric character (for example,
Values: Example: |
You cannot use the State Control block in Classic mode or remove the State Control block from the Resettable Synchronous Subsystem block.
The Reset trigger type of the Reset port inside the subsystem must be set to
level hold.A Delay block with nonvirtual bus input signals inside a Resettable Synchronous Subsystem is not supported if you enable optimizations on the subsystem.
HDL code generation supports only boolean datatype at the Reset port.
HDL Coder does not support these blocks inside a Resettable Synchronous Subsystem:
Stateflow Charts
All RAM blocks or blocks that infer a RAM in the generated HDL code. The RAM blocks include:
Single Port RAM
Simple Dual Port RAM
Dual Port RAM
Dual Rate Dual Port RAM
HDL FIFO
hdl.RAMsystem object
DSP System Toolbox
Biquad Filter
NCO HDL Optimized
Communications Toolbox
Convolutional Encoder
Viterbi Decoder
PN Sequence Generator
Integer-Output RS Decoder HDL Optimized
Vision HDL Toolbox
Demosaic Interpolator
Edge Detector
Histogram
Image Filter, Median Filter, Bilateral Filter
Line Memory
Binary and Grayscale Morphology blocks
Pixel Stream FIFO
Wireless HDL Toolbox
LTE Turbo Decoder and LTE Turbo Encoder
LTE Convolutional Encoder
LTE OFDM Demodulator and LTE OFDM Modulator
NR Polar Encoder and NR Polar Decoder
Viterbi Decoder
FFT 1536
RS Decoder
OFDM Channel Estimator
NR LDPC Encoder and NR LDPC Decoder
Version History
Introduced in R2016bThe DSPStyle HDL block property has been removed. To specify synthesis attributes for multiplier mapping, use the SynthesisAttributes HDL block property instead.
Use the SynthesisAttributes HDL block property to specify the synthesis attributes for the block and its output signals. HDL Coder includes these attributes in the generated HDL code.
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Website auswählen
Wählen Sie eine Website aus, um übersetzte Inhalte (sofern verfügbar) sowie lokale Veranstaltungen und Angebote anzuzeigen. Auf der Grundlage Ihres Standorts empfehlen wir Ihnen die folgende Auswahl: .
Sie können auch eine Website aus der folgenden Liste auswählen:
So erhalten Sie die bestmögliche Leistung auf der Website
Wählen Sie für die bestmögliche Website-Leistung die Website für China (auf Chinesisch oder Englisch). Andere landesspezifische Websites von MathWorks sind für Besuche von Ihrem Standort aus nicht optimiert.
Amerika
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)