pointsToWorld
(Not recommended) Determine world coordinates of image points
pointsToWorld is not recommended. Use the img2world2d function instead. For more information, see Version History.
Syntax
Description
worldPoints = pointsToWorld(intrinsics,tform,imagePoints)imagePoints, onto points on the
X-Y plane in world coordinates,
worldPoints using the rigid3d
transformation tform.
worldPoints = pointsToWorld(intrinsics,rotationMatrix,translationVector,imagePoints)
Examples
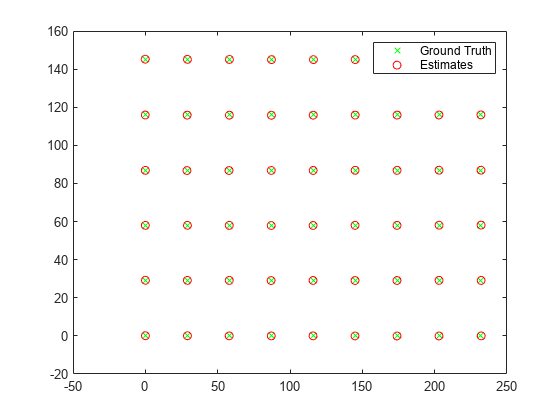
Map the points of a fisheye image to world coordinates and compare these points to the ground truth points. A series of checkerboard pattern images are used to estimate the fisheye parameters and calibrate the camera.
Create a set of checkerboard calibration images.
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata" ,... "calibration","gopro"));
Detect the checkerboard corners in the images. Leave the last image for testing.
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files(1:end-1));
Generate the world coordinates of the checkerboard corners in the pattern-centric coordinate system, with the upper-left corner at (0,0).
squareSize = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Estimate the fisheye camera parameters from the image and world points. Use the first image to get image size.
I = imread(images.Files{end});
imageSize = [size(I,1) size(I,2)];
fisheyeParams = estimateFisheyeParameters(imagePoints,worldPoints,imageSize);
intrinsics = fisheyeParams.Intrinsics;Find the reference object in the new image.
imagePoints = detectCheckerboardPoints(I,PartialDetections=false);
Compute new extrinsics.
[R,t] = extrinsics(imagePoints,worldPoints,intrinsics);
Map image points to world coordinates in the X-Y plane.
newWorldPoints = pointsToWorld(intrinsics,R,t,imagePoints);
Compare estimated world points to the ground truth points.
plot(worldPoints(:,1),worldPoints(:,2),"gx"); hold on plot(newWorldPoints(:,1),newWorldPoints(:,2),"ro"); legend("Ground Truth","Estimates"); hold off
Input Arguments
Camera parameters, specified as a cameraIntrinsics or a fisheyeIntrinsics object. The objects store information about
a camera’s intrinsic calibration parameters, including the lens distortion
parameters.
Transformation of the camera in world coordinates, specified as a rigid3d object.
3-D rotation of the world coordinates relative to the image coordinates,
specified as a 3-by-3 matrix. The rotation matrix, together with the
translation vector, enable you to transform points from the world coordinate
system to the camera coordinate system. The
rotationMatrix and
translationVector inputs must be the same data type.

Data Types: double | single
3-D translation of the world coordinates relative to the image
coordinates, specified as a 1-by-3 vector. The translation vector, together
with the rotation matrix, enable you to transform points from the world
coordinate system to the camera coordinate system. The
rotationMatrix and
translationVector inputs must be the same data type.
Data Types: double | single
Image points, specified as an M-by-2 matrix containing M [x, y] coordinates of image points.
When using the cameraParameters object as the
cameraParams input,
pointsToWorld does not account for lens distortion.
Therefore, the imagePoints input must contain image
points detected in the undistorted image, or they must be undistorted using
the undistortPoints function.
For a fisheyeIntrinsics object, the image points are
distorted.
Output Arguments
Extended Capabilities
Version History
Introduced in R2016aSee Also
Apps
Functions
img2world2d|world2img|undistortImage|undistortPoints|estimateCameraParameters|estimateExtrinsics|extr2pose|pose2extr|estworldpose|estrelpose