Image Coordinate Systems
You can access locations in images using several different image coordinate systems. You can specify locations using discrete pixel indices because images are stored as arrays. You can also specify locations using continuous spatial coordinates because images represent real-world scenes in continuous space.
Pixel Indices
As described in Images in MATLAB, MATLAB® stores most images as arrays. Each (row, column) index of the array corresponds to a single pixel in the displayed image.
There is a one-to-one correspondence between pixel indices and subscripts for the first two matrix dimensions. Similar to array indexing in MATLAB, pixel indices are integer values and range from 1 to the length of the row or column. The indices are ordered from top to bottom, and from left to right.
For example, the data for the pixel in the fifth row, second column is stored in the matrix element (5, 2). You use normal MATLAB matrix subscripting to access values of individual pixels. For example, the MATLAB code
I(2,15)
returns the value of the pixel at row 2, column 15 of the single-channel image
I. Similarly, the MATLAB code
RGB(2,15,:)
returns the color values of the pixel at row 2, column 15 of the multichannel
image RGB.
Spatial Coordinates
In a spatial coordinate system, locations in an image are positions on a continuous plane. Locations are described in terms of Cartesian x- and y- coordinates (not row and column indices, as in the pixel indexing system). From this Cartesian perspective, an (x, y) coordinate such as (3.2, 5.3) is meaningful and distinct from the coordinate (5, 3).
Image Processing Toolbox™ defines two types of spatial coordinate systems depending on the frame of reference. Intrinsic coordinates specify locations with respect to the frame of reference of the image. World coordinates specify locations with respect to an external world observer.
Intrinsic Coordinates
By default, the toolbox defines spatial image coordinates using the intrinsic coordinate system. This spatial coordinate system corresponds to the pixel indices of the image. The intrinsic coordinates (x, y) of the center point of any pixel are identical to the column and row indices for that pixel. For example, the center point of the pixel in row 5, column 3 has spatial coordinates x = 3.0 and y = 5.0. However, note that the order of the intrinsic coordinates (3.0, 5.0) is reversed relative to the pixel indices (5, 3).
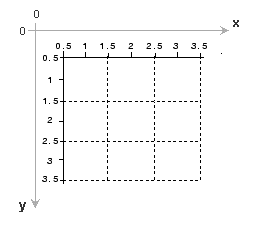
The intrinsic coordinates of the center of every pixel are integer valued. The center of the upper-left pixel has intrinsic coordinates (1.0, 1.0). The center of the lower-right pixel has intrinsic coordinates (numCols, numRows), where numCols and numRows are the number of columns and rows in the image, respectively. In general, the center of the pixel with (row, column) pixel indices (r, c) has spatial coordinates x = c and y = r in the intrinsic coordinate system.
Because the size of each pixel in the intrinsic coordinate system is one unit, the boundaries of the image have fractional coordinates. The upper-left corner of the image is located at (0.5, 0.5), not at (0, 0). Similarly, the lower-right corner of the image is located at (numCols + 0.5, numRows + 0.5).
Several functions primarily work with spatial coordinates rather than pixel indices, but as long as you are using the default spatial coordinate system (intrinsic coordinates), you can specify locations in terms of their columns (x) and rows (y).
For 3-D images, the z-axis points into the page following a
right-handed coordinate system. The intrinsic coordinates (x,
y, z) of the center point of any voxel
are identical to the column, row, and page (or plane) indices for that voxel.
For example, the center point of the voxel in row 5, column 3, page 2 has
spatial coordinates x = 3.0, y = 5.0, and
z = 2.0.  Similar to 2-D images, the intrinsic
coordinates of the center of every voxel in a 3-D image are integer valued, and
the size of each voxel is one unit. For multidimensional images with more than
three dimensions, the axes after the z-axis similarly
correspond to the array indices after the third dimension.
Similar to 2-D images, the intrinsic
coordinates of the center of every voxel in a 3-D image are integer valued, and
the size of each voxel is one unit. For multidimensional images with more than
three dimensions, the axes after the z-axis similarly
correspond to the array indices after the third dimension.
World Coordinates
A world coordinate system (also called a nondefault spatial coordinate system) relaxes several constraints of the intrinsic coordinate system. In a world coordinate system, pixels or voxels can have any length, width, or depth, and they can be centered on any coordinate.
Some situations when you might want to use a world coordinate system in 2-D, 3-D, or multidimensional images include:
When you perform a geometric transformation, such as translation, on an image and want to preserve information about how the new position relates to the original position.
When pixels or voxels are not isotropic. For example, in magnetic resonance imaging (MRI), you can collect data such that voxels have a higher sampling rate in the x- and y-directions than in the z-direction.
When you know how the extent of pixels or voxels aligns with positions in the real world. For example, in an aerial photograph, every pixel might cover a specific 5-by-5 meter patch on the ground.
When you want to reverse the direction of any of the axes. This is a common technique to use with geospatial data.
There are several ways to define a world coordinate system. You can define a world coordinate system by using spatial referencing objects, which encode the location of the image in a world coordinate system, the image resolution, and how the image extent relates to intrinsic and world coordinates. You can also encode the maximum and minimum coordinate in each dimension in the spatial referencing objects. For more information, see Define World Coordinate System of Image.