Kamerakalibrierung
Bei der Kamerakalibrierung werden die Kameraparameter anhand von Bildern geschätzt, die ein Kalibriermuster enthalten. Die Parameter umfassen intrinsische Eigenschaften der Kamera, Verzerrungskoeffizienten sowie extrinsische Eigenschaften der Kamera. Mit diesen Kameraparametern können Sie Objektiv-Verzerrungseffekte aus einem Bild entfernen, planare Objekte messen, 3D-Szenen aus den Bildern mehrerer Kameras rekonstruieren und weitere Computer-Vision-Anwendungen durchführen.
Klicken Sie auf eine Illustration, um das zugehörige Thema anzuzeigen.
Die Kalibrierung von Fisheye-Kameras erweitert diesen Prozess durch die Schätzung von Parametern und Verzerrungskoeffizienten, die für Fisheye-Objektive spezifisch sind. Dies ist für die Korrektur extremer Verzerrungen und die genaue Zuordnung von Bildpunkten zu realen Koordinaten in Anwendungen wie SLAM, Odometrie, Überwachung, VR und Image Stitching unerlässlich. Die Multikamera-Kalibrierung sorgt dafür, dass alle Kameras in einem System ein einheitliches Verständnis der Szenengeometrie haben, was Aufgaben wie 3D-Bewegungserfassung, -Rekonstruktion und -Photogrammetrie ermöglicht, während die Hand-Augen-Kalibrierung von Robotern die räumliche Beziehung zwischen Roboterarm und Kamera für präzises Visual Servoing und entsprechende Interaktionen festlegt. Sie können die Camera Calibrator-App und -Funktionen für die intrinsischen und extrinsischen Eigenschaften sowie die Verzerrung bei Einzelkameras und die Stereo Camera Calibrator-App und -Funktionen für Stereoparameter und relative Ausrichtungen sowie spezielle Fisheye-Kalibrierfunktionen zur Beseitigung von Verzerrungen und genauen 3D-Rekonstruktion von Weitwinkeln verwenden.
Apps
| Camera Calibrator | Estimate geometric parameters of a single camera |
| Stereo Camera Calibrator | Estimate geometric parameters of a stereo camera |
Funktionen
Themen
- What Is Camera Calibration?
Estimate the parameters of a lens and image sensor of an image or video camera.
- What Is Robot Hand-Eye Calibration?
Understand moving- and stationary- robot camera configurations for hand-eye calibration.
- What Is Multi-Camera Calibration?
Estimate position and orientations of cameras in a multi-camera system.
- Fisheye Calibration Basics
Fisheye camera model and calibration in MATLAB.
- Using the Single Camera Calibrator App
Prepare camera calibration images and estimate camera intrinsic parameters.
- Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
- Calibration Patterns
Camera Calibration using a checkerboard, circle grid, or custom detector pattern.
- Prepare Camera and Capture Images for Camera Calibration
Set up your camera and capture camera calibration images to use with the calibrator app.
- Prepare Cameras and Capture Images for Multi-Camera Calibration
Set up your camera and capture camera calibration images for multi-camera calibration.
- Point Feature Types
Choose functions that return and accept points objects for several types of features.
- Koordinatensysteme
Angabe von Pixel-Indizes, räumlichen Koordinaten und 3D-Koordinatensystemen
Enthaltene Beispiele
3-D Motion Reconstruction Using Multiple Cameras
Reconstruct 3-D motion of an object for use in a motion capture system consisting of multiple cameras.
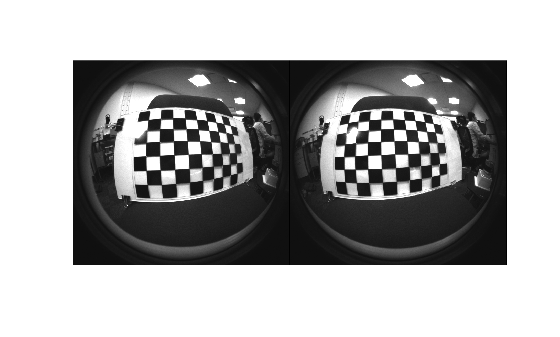
Stereo Fisheye Camera Calibration
Calibrate a stereo fisheye camera by determining each camera's intrinsic parameters and estimate the baseline between them.

Estimate Pose of Moving Camera Mounted on a Robot
Perform and verify hand-eye calibration for a robot arm equipped with a camera.

Estimate Pose of Fixed Camera Relative to Robot Base
Estimate the camera intrinsics for a fixed camera using hand-to-eye calibration.

Camera Calibration Using Custom Planar Calibration Patterns
Detect and localize AprilTags in a calibration pattern.

Evaluating the Accuracy of Single Camera Calibration
Evaluate the accuracy of estimated camera parameters.
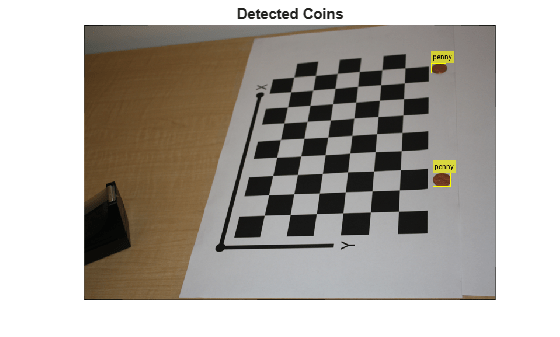
Measuring Planar Objects with a Calibrated Camera
Measure the diameter of coins in world units using a single calibrated camera.

Configure Monocular Fisheye Camera
Convert a fisheye camera model to a pinhole model.