undistortFisheyePoints
Correct point coordinates for fisheye lens distortion
Syntax
Description
undistortedPoints = undistortFisheyePoints(points,intrinsics)
undistortedPoints = undistortFisheyePoints(___,scaleFactor)scaleFactor and
the previous inputs.
[___,
also returns a camIntrinsics] = undistortFisheyePoints(___)cameraIntrinsics object, which
corresponds to a virtual perspective camera that produces undistorted points.
[___,
also returns reprojectionErrors] = undistortFisheyePoints(___)reprojectionErrors used to evaluate the accuracy
of undistorted points. The function computes the reprojection errors by applying
distortion to the points, and taking the distances between the result and the
corresponding input points.
Examples
Undistort and translate checkerboard points detected in a calibration image, and then display the results.
Create an imageDatastore object containing checkerboard calibration images.
images = imageDatastore(fullfile(toolboxdir('vision'),'visiondata',... 'calibration','gopro')); imageFileNames = images.Files;
Detect the calibration pattern from the images.
[imagePoints,patternDims] = detectCheckerboardPoints(imageFileNames);
Generate world coordinates for the corners of the checkerboard squares.
squareSize = 29; % millimeters worldPoints = patternWorldPoints('checkerboard',patternDims,squareSize);
Estimate the fisheye parameters from the image and world points. Get the image size from the first image.
I = readimage(images,10); imageSize = [size(I,1) size(I,2)]; params = estimateFisheyeParameters(imagePoints,worldPoints,imageSize);
In the first image, detect the checkerboard points.
points = detectCheckerboardPoints(I);
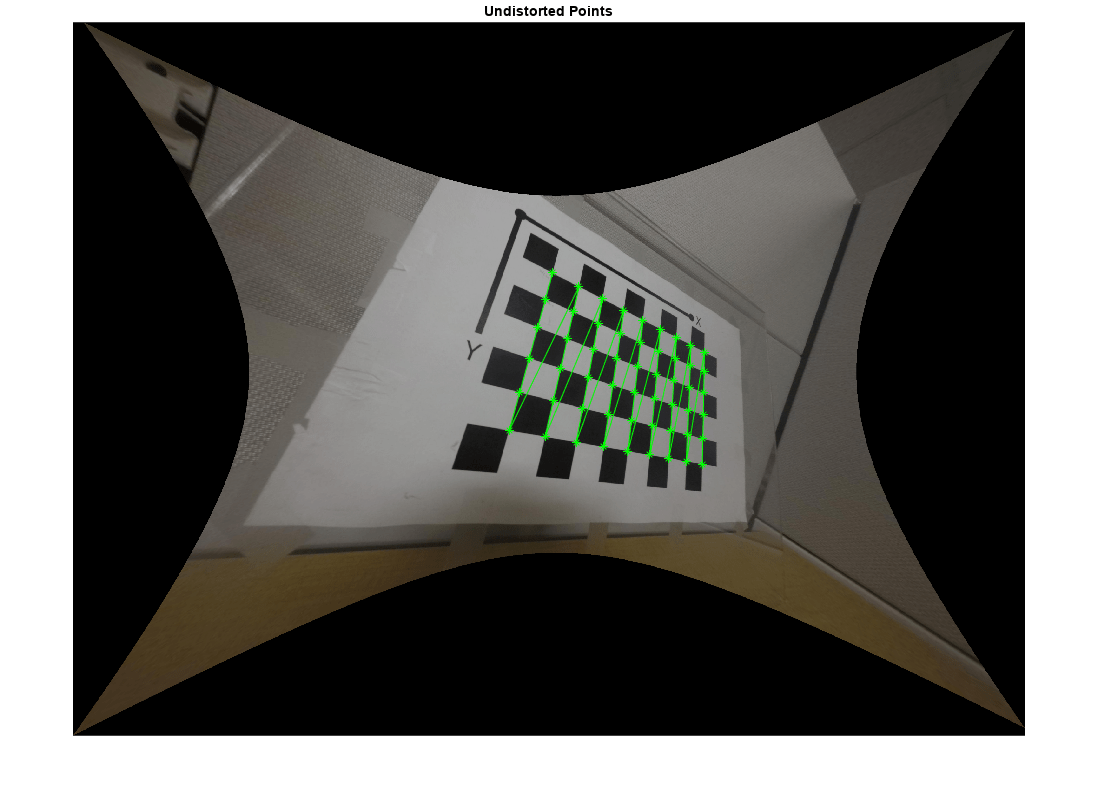
Undistort the points and image.
[undistortedPoints,intrinsics1] = undistortFisheyePoints(points,params.Intrinsics); [J, intrinsics2] = undistortFisheyeImage(I,params.Intrinsics,'OutputView','full');
Translate the undistorted points.
newOrigin = intrinsics2.PrincipalPoint - intrinsics1.PrincipalPoint;
undistortedPoints = [undistortedPoints(:,1) + newOrigin(1), ...
undistortedPoints(:,2) + newOrigin(2)];Display the results.
figure imshow(I) hold on plot(points(:,1),points(:,2),'r*-') title('Detected Points') hold off
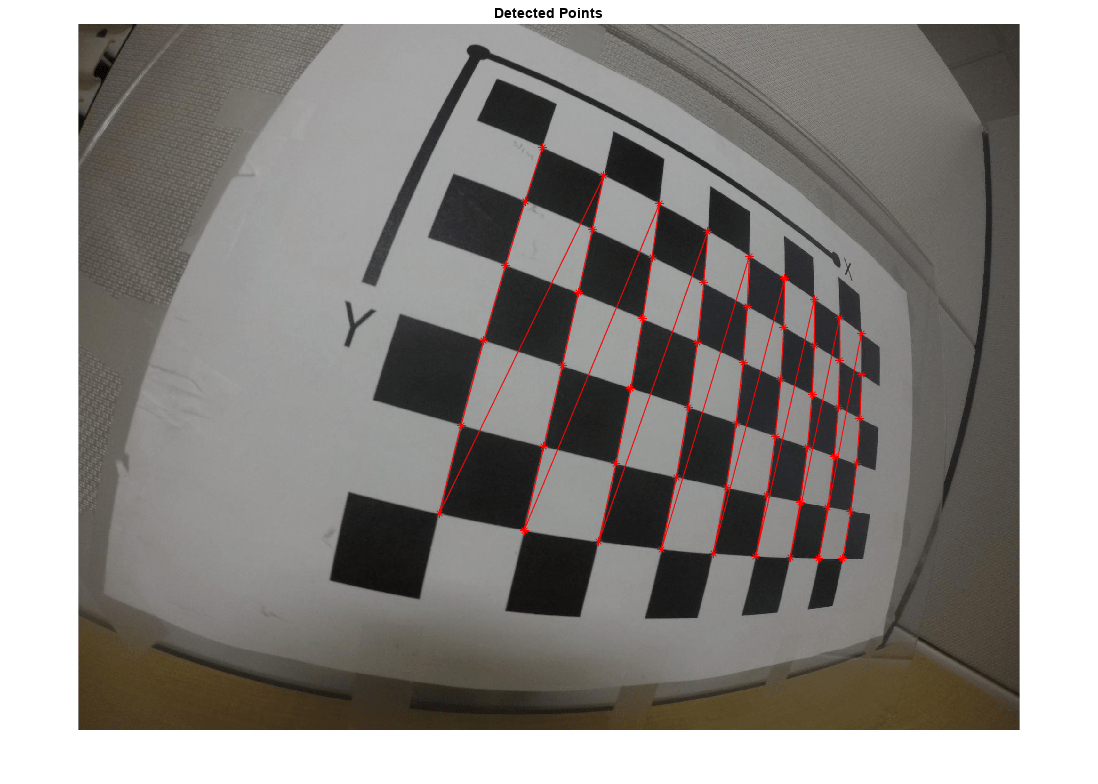
figure imshow(J) hold on plot(undistortedPoints(:, 1),undistortedPoints(:, 2),'g*-') title('Undistorted Points') hold off