Steering System

Libraries:
Vehicle Dynamics Blockset /
Steering
Description
The Steering System block implements dynamic steering to calculate the wheel steer angles for rack-and-pinion mechanisms with friction[4], compliance, and Ackermann steering features. The block uses the steering wheel input angle or torque input, vehicle speed, caster angle, and right and left wheel feedbacks to calculate the wheel steer angles. The block uses the vehicle coordinate system.
If you select the Power assist parameter, you can specify a torque assist lookup table that is a function of the vehicle speed and steering wheel input torque. The block uses the steering wheel input torque and torque assist to calculate the steering dynamics. If you select the Ackerman steering parameter, you can specify a lookup table of percentage Ackermann values to calculate the Ackermann steering effects, or a constant Ackermann percentage, where 100 percent means perfect Ackermann steering.
If you select the Power assist, Ackerman steering, or Kingpin moment[5] parameters in the Input signals section, you can specify additional inputs for the external power assist torques, percent Ackermann values, or kingpin moments.
Use the Steered axle parameter to specify whether the front or rear axle is steered.
| Setting | Implementation |
|---|---|
| Front | Front axle steering |
| Rear | Rear axle steering |
Steering Type
For rack-and-pinion steering, pinion rotation causes linear motion of the rack, which steers the wheels through the tie rods and steering arms.
To calculate the steered wheel angles, the block uses these equations.
The illustration and equations use these variables.
| δin |
Pinion angle (steering shaft angle into pinion) |
| δL |
Left wheel steer angle |
| δR |
Right wheel steer angle |
| TW |
Track width |
| r |
Pinion radius |
| ΔP |
Linear change in rack position from "straight ahead" position |
| D |
Longitudinal distance between rack and steered axle |
| lrack |
Rack length (distance between inner tie-rod ends) |
| larm |
Steering arm length |
| lrod |
Tie rod length |
Steering Effects
For ideal Ackerman steering, the left and right wheel angles have a common turning center.
To calculate the ideal wheel angles, the block uses these equations.
After the block calculates the ideal wheel angles, it uses the Ackerman percentage to adjust the outside wheel angle.
The outside wheel angle depends on the turn direction.
Right turn
Outside angle, δo, is left wheel angle, δL
Inside angle, δi, is right wheel angle, δR
Left turn
Outside angle, δo, is right wheel angle, δR
Inside angle, δi, is left wheel angle, δL
The illustration and equations use these variables.
| δin | Steering angle |
| δL | Left wheel angle |
| δR | Right wheel angle |
| δo | Outside wheel angle |
| δi | Inside wheel angle |
| pAck | Ackerman percentage |
| TW | Track width |
| WB | Wheelbase |
| γ | Steering ratio |
If you do not select the Kingpin moment parameter in the Input signals section to specify right and left kingpin moment inputs, the block implements the total kingpin moment using these equations:
The illustration and equations use these variables.
| Mkp | Total kingpin moment |
| Mkpfx | Moment due to tractive force |
| Mkpfy | Moment due to cornering force |
| Mkpfz | Moment due to vertical force |
| Mkpmx | Tire overturning moment |
| Mkpmy | Tire rolling resistance moment |
| Mkpmz | Tire aligning moment |
| Fy | Fy tire input |
| nT | Caster trail |
| ν | Dynamic caster angle input |
| δ | Dynamic steering angle |
| ƛ | Kingpin inclination angle |
| Fz | Fz tire input |
| rs | Scrub radius |
| Mz | Mz tire input |
| Kpoffset | Kingpin offset |
| Hl | Hub lead |
| rsl | Static loaded radius |
The block implements the tie rod force using these equations:
The illustration and equations use these variables.
| Ftie | Tie rod force |
| Mkp | Kingpin moment |
| Lsa | Swing arm length for rack and pinon steering |
| ƛ | Kingpin inclination angle |
| δ | Dynamic steering angle |
| rs | Overall steer ratio |
| kr | Rack gain |
| ν | Dynamic caster angle input |
Examples
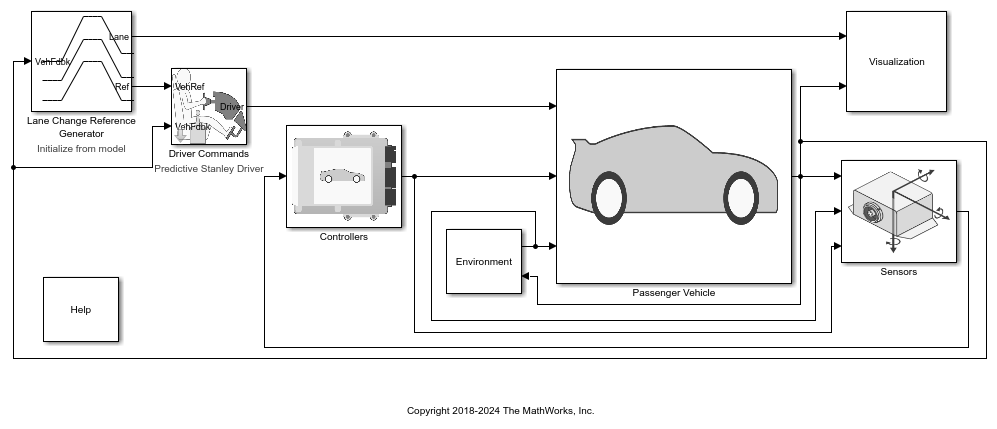
Double Lane Change Reference Application
Simulate a full vehicle dynamics model undergoing a double lane change maneuver standard ISO 3888-2. Use for vehicle dynamics ride and handling analysis and chassis controls development, including yaw stability and lateral acceleration limits.
Ports
Input
Output
Parameters
References
[1] Crolla, David, David Foster, et al. Encyclopedia of Automotive Engineering. Volume 4, Part 5 (Chassis Systems) and Part 6 (Electrical and Electronic Systems). Chichester, West Sussex, United Kingdom: John Wiley & Sons Ltd, 2015.
[2] Gillespie, Thomas. Fundamentals of Vehicle Dynamics. Warrendale, PA: Society of Automotive Engineers, 1992.
[3] Vehicle Dynamics Standards Committee. Vehicle Dynamics Terminology. SAE J670. Warrendale, PA: Society of Automotive Engineers, 2008.
[4] Pfeffer, P. E., M. Harrer, and D. N. Johnston. “Interaction of Vehicle and Steering System Regarding On-Centre Handling.” Vehicle System Dynamics 46, no. 5 (May 2008): 413–28. https://doi.org/10.1080/00423110701416519.
[5] Reimpell, Jörnsen, Helmut Stoll, and Jürgen W. Betzler. The Automotive Chassis: Engineering Principles Chassis and Vehicle Overall, Wheel Suspensions and Types of Drive, Axle Kinematics and Elastokinematics, Steering, Springing, Tyres, Construction and Calculations Advice. 2nd ed. Oxford: Butterworth Heinemann, 2001.