What Is an S-Function?
S-functions or system functions provide a powerful mechanism for extending the capabilities of the Simulink® environment. An S-function is a computer language description of a Simulink block written in MATLAB®, C, C++, or Fortran®. S-functions use a special calling syntax called the S-function API that enables you to interact with the Simulink engine. This interaction is very similar to the interaction that takes place between the engine and built-in Simulink blocks.
For your blocks written in MATLAB, use Level-2 MATLAB S-functions. To implement your Level-2 MATLAB S-Function in a Simulink model, use the Level-2 MATLAB S-Function block. For more information, see Write Level-2 MATLAB S-Functions.
For your blocks written in C, C++, or Fortran, use C MEX S-functions. To implement your C MEX S-Function in a Simulink model, compile your S-Function using the
mexutility and the S-Function block. After you compile your S-function and implement it using an S-Function block, you can customize the user interface using masking (see Author Block Masks).
As with other MEX files, S-functions are dynamically linked subroutines that the MATLAB execution engine can automatically load and execute. For more information, see Create and Implement a Basic C MEX S-Function.
You can also use S-Function Builder block to integrate your new or existing C or C++ code and create a C MEX S-function from the specifications you provide.
If you have Simulink Coder™, you can use S-functions in a model and generate code. You can also customize the code generated for S-functions by writing a Target Language Compiler (TLC) file. For more information, see S-Functions and Code Generation (Simulink Coder).
How S-Functions Work
S-functions define how a block works during different parts of simulation, such as initialization, update, derivatives, outputs and termination. In every step of a simulation, a method is invoked by the simulation engine to fulfill a specific task. S-function basics require fundamental knowledge of mathematical relationships between the block inputs, states, and outputs. To understand how S-functions work, first you need to understand the mathematics of how Simulink simulates a model, namely the stages of simulation. See Simulation Phases in Dynamic Systems for more detailed information.
Mathematics of Simulink Blocks
A Simulink block consists of a set of inputs, a set of states, a set of parameters, and a set of outputs, where the outputs are a function of the simulation time, the inputs, parameters, and the states.

The following equations express the mathematical relationships between the inputs, outputs, parameters, states, and simulation time.
where
Simulation Stages
Execution of a Simulink model proceeds in stages. In the Initialization phase, the Simulink engine incorporates library blocks into the model, propagates signal widths, data types, and sample times, evaluates block parameters, determines block execution order, and allocates memory. The engine then enters a simulation loop, where each pass through the loop is referred to as a simulation step. During each simulation step, the engine executes each block in the model in the order determined during initialization. For each block, the engine invokes functions that compute the block states, derivatives, and outputs for the current sample time. The entire simulation loop then continues until the simulation is complete.
Model Initialization - Model is prepared for simulation. In this stage, block parameters are evaluated, block execution order is determined, and memory for each operation is allocated. After this stage, blocks go through a simulation loop.
Update of Continuous States and Time - Takes place only if the model has
continuous states. You can modify minor step methods such as
mdlOutputs, mdlDerivatives, and
mdlZeroCrossing to compute the outputs.
S-Function Callback Methods
An S-function comprises a set of S-function callback methods that perform tasks required at each simulation stage. During simulation of a model, at each simulation stage, the Simulink engine calls the appropriate methods for each S-Function block in the model. Tasks performed by S-function callback methods include:
Compilation — In this stage, the Simulink engine initializes the S-function. Tasks include:
Incorporating library blocks into the model, and propagating signal widths, data types, and sample times
Setting the number and dimensions of input and output ports
Evaluating block parameters, and determining the block execution order
Allocating memory and storage areas
Calculation of outputs — At this state, outputs are calculated until all the block output ports are valid for the current time step, namely all output values are at a certain error range.
Update discrete states — In this call, the block performs once-per-time-step activities such as updating discrete states.
Initialize and Terminate Methods — These optional methods perform initialization and termination activities required by S-function only once. The initialization activities may include setting up user data, or initializing state vectors in an S-function. The termination method performs any actions such as freeing of memory that is required when the simulation is terminated, or when an S-function block is deleted from a model.
Integration — This applies to models with continuous states and/or nonsampled zero crossings. If your S-function has continuous states, the engine calls the output and derivative portions of your S-function at minor time steps. This is so the solvers can compute the states for your S-function. If your S-function has nonsampled zero crossings, the engine also calls the output and zero-crossings portions of your S-function at minor time steps so that it can locate the zero crossings.
To understand the terminology on simulations especially for S-functions, see S-Function Concepts.
Use S-Functions in Models
To incorporate a C MEX S-function in a model, drag a S-function block from the Simulink Library Browser. Similarly, to incorporate a Level-2 MATLAB S-function to the model, drag a Level-2 MATLAB S-function block to the model.
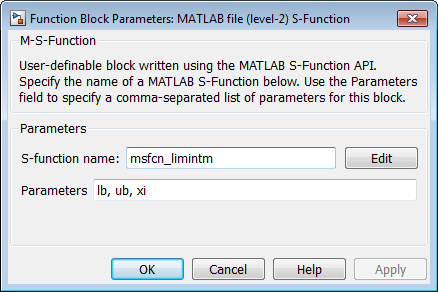
Open up the Block Parameters dialog box and specify the S-function name at the S-function name field to provide functionality for the S-function block. For example, type
timestwoand hit Apply to add a C MEX S-function that multiplies the incoming signal by two.
Note
If the MATLAB path includes a C MEX file and a MATLAB file having the same name referenced by an S-Function block, the S-Function block uses the C MEX file.
Passing Parameters to S-Functions
In both S-function block and Level-2 MATLAB S-Function Block Parameters window allows you to specify parameter values to pass to the corresponding S-function. To use these fields, you must know the parameters the S-function requires and the order in which the function requires them. (If you do not know, consult the S-function's author, documentation, or source code.) Enter the parameters, separated by a comma, in the order required by the S-function. The parameter values can be constants, names of variables defined in the MATLAB or model workspace, or MATLAB expressions.
The following example illustrates usage of the Parameters field to enter user-defined parameters for a Level-2 MATLAB S-function.
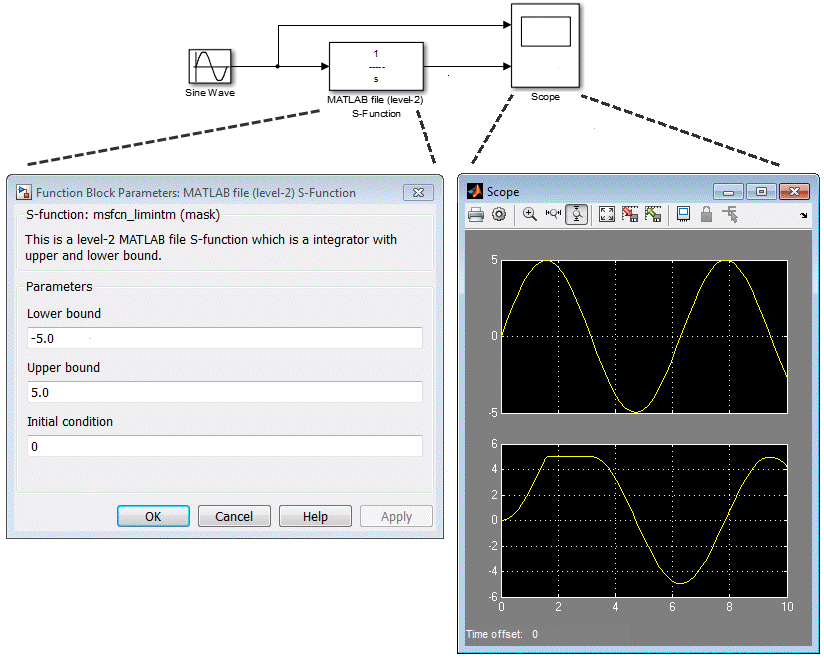
The model msfcndemo_limintm in this example incorporates
the sample S-function msfcn_limintm.m.
The msfcn_limintm.m S-function accepts three parameters: a
lower bound, an upper bound, and an initial condition. The S-function outputs
the time integral of the input signal if the time integral is between the lower
and upper bounds, the lower bound if the time integral is less than the lower
bound, and the upper bound if the time integral is greater than the upper bound.
The dialog box in the example specifies a lower and upper bound and an initial
condition of -5.0, 5.0, and
0, respectively. The scope shows the resulting output
when the input is a sine wave of amplitude 5.
See Processing S-Function Parameters and Handle Errors in S-Functions for information on how to access user-specified parameters in an S-function.
You can use the masking facility to create custom dialog boxes and icons for your S-Function blocks. Masked dialog boxes can make it easier to specify additional parameters for S-functions. For a discussion on masking, see Author Block Masks.
When to Use an S-Function
You can use S-functions for a variety of applications, including:
Creating new general purpose blocks
Adding blocks that represent hardware device drivers
Incorporating existing C code into a simulation (see Integrate C Functions Using Legacy Code Tool)
Describing a system as a set of mathematical equations
Using graphical animations (see the inverted pendulum example, Inverted Pendulum with Animation)
The most common use of S-functions is to create custom Simulink blocks (see Block Authoring Basics). When you use an S-function to create a general-purpose block, you can use it many times in a model, varying parameters with each instance of the block.
See Also
Level-2 MATLAB S-Function | S-Function Builder | S-Function | MATLAB Function