checkGradients
Check first derivative function against finite-difference approximation
Since R2023b
Syntax
Description
valid = checkGradients(fun,x0)fun at a
point near x0 against a finite-difference approximation. By default, the
comparison assumes that the function is an objective function. To check constraint
functions, set the IsConstraint name-value argument to
true.
valid = checkGradients(___,Name=Value)
Examples
The rosen function at the end of this example computes the Rosenbrock objective function and its gradient for a 2-D variable x.
Check that the computed gradient in rosen matches a finite-difference approximation near the point [2,4].
x0 = [2,4]; valid = checkGradients(@rosen,x0)
valid = logical
1
function [f,g] = rosen(x) f = 100*(x(1) - x(2)^2)^2 + (1 - x(2))^2; if nargout > 1 g(1) = 200*(x(1) - x(2)^2); g(2) = -400*x(2)*(x(1) - x(2)^2) - 2*(1 - x(2)); end end
The vecrosen function at the end of this example computes the Rosenbrock objective function in least-squares form and its Jacobian (gradient).
Check that the computed gradient in vecrosen matches a finite-difference approximation near the point [2,4].
x0 = [2,4]; valid = checkGradients(@vecrosen,x0)
valid = logical
1
function [f,g] = vecrosen(x) f = [10*(x(1) - x(2)^2),1-x(1)]; if nargout > 1 g = zeros(2); % Allocate g g(1,1) = 10; % df(1)/dx(1) g(1,2) = -20*x(2); % df(1)/dx(2) g(2,1) = -1; % df(2)/dx(1) g(2,2) = 0; % df(2)/dx(2) end end
The rosen function at the end of this example computes the Rosenbrock objective function and its gradient for a 2-D variable x.
For some initial points, the default forward finite differences cause checkGradients to mistakenly indicate that the rosen function has incorrect gradients. To see result details, set the Display option to "on".
x0 = [0,0];
valid = checkGradients(@rosen,x0,Display="on")____________________________________________________________ Objective function derivatives: Maximum relative difference between supplied and finite-difference derivatives = 1.48826e-06. Supplied derivative element (1,1): -0.126021 Finite-difference derivative element (1,1): -0.126023 checkGradients failed. Supplied derivative and finite-difference approximation are not within 'Tolerance' (1e-06). ____________________________________________________________
valid = logical
0
checkGradients reports a mismatch, with a difference of just over 1 in the sixth decimal place. Use central finite differences and check again.
opts = optimoptions("fmincon",FiniteDifferenceType="central"); valid = checkGradients(@rosen,x0,opts,Display="on")
____________________________________________________________ Objective function derivatives: Maximum relative difference between supplied and finite-difference derivatives = 1.29339e-11. checkGradients successfully passed. ____________________________________________________________
valid = logical
1
Central finite differences are generally more accurate. checkGradients reports that the gradient and central finite-difference approximation match to about 11 decimal places.
function [f,g] = rosen(x) f = 100*(x(1) - x(2)^2)^2 + (1 - x(2))^2; if nargout > 1 g(1) = 200*(x(1) - x(2)^2); g(2) = -400*x(2)*(x(1) - x(2)^2) - 2*(1 - x(2)); end end
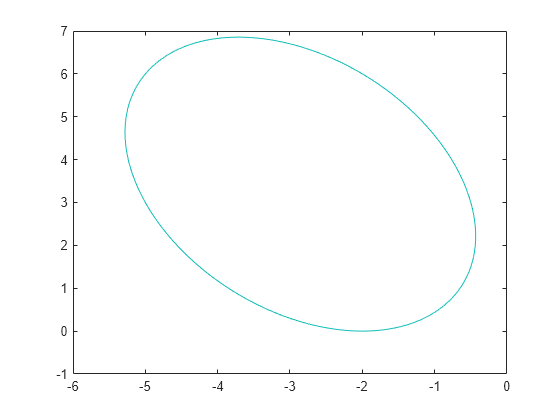
The tiltellipse function at the end of this example imposes the constraint that the 2-D variable x is confined to the interior of the tilted ellipse
.
Visualize the ellipse.
f = @(x,y) x.*y/2+(x+2).^2+(y-2).^2/2-2; fcontour(f,LevelList=0) axis([-6 0 -1 7])
Check the gradient of this nonlinear inequality constraint function.
x0 = [-2,6]; valid = checkGradients(@tiltellipse,x0,IsConstraint=true)
valid = 1×2 logical array
1 1
function [ineqnonlin,eqnonlin,gineqnonlin,geqnonlin] = tiltellipse(x) ineqnonlin = x(1)*x(2)/2 + (x(1) + 2)^2 + (x(2)- 2)^2/2 - 2; eqnonlin = []; if nargout > 2 gineqnonlin = [x(2)/2 + 2*(x(1) + 2); x(1)/2 + x(2) - 2]; geqnonlin = []; end end
The fungrad function at the end of this example correctly calculates the gradient of some components of the least-squares objective, and incorrectly calculates others.
Examine the second output of checkGradients to see which components do not match well at the point [2,4]. To see result details, set the Display option to "on".
x0 = [2,4];
[valid,err] = checkGradients(@fungrad,x0,Display="on")____________________________________________________________ Objective function derivatives: Maximum relative difference between supplied and finite-difference derivatives = 0.749797. Supplied derivative element (3,2): 19.9838 Finite-difference derivative element (3,2): 5 checkGradients failed. Supplied derivative and finite-difference approximation are not within 'Tolerance' (1e-06). ____________________________________________________________
valid = logical
0
err = struct with fields:
Objective: [3×2 double]
The output shows that element [3,2] is incorrect. But is that the only problem? Examine err.Objective and look for entries that are far from 0.
err.Objective
ans = 3×2
0.0000 0.0000
0.0000 0
0.5000 0.7498
Both the [3,1] and [3,2] elements of the derivative are incorrect. The fungrad2 function at the end of this example corrects the errors.
[valid,err] = checkGradients(@fungrad2,x0,Display="on")____________________________________________________________ Objective function derivatives: Maximum relative difference between supplied and finite-difference derivatives = 2.2338e-08. checkGradients successfully passed. ____________________________________________________________
valid = logical
1
err = struct with fields:
Objective: [3×2 double]
err.Objective
ans = 3×2
10-7 ×
0.2234 0.0509
0.0003 0
0.0981 0.0042
All the differences between the gradient and finite-difference approximations are less than 1e-7 in magnitude.
This code creates the fungrad helper function.
function [f,g] = fungrad(x) f = [10*(x(1) - x(2)^2),1 - x(1),5*(x(2) - x(1)^2)]; if nargout > 1 g = zeros(3,2); g(1,1) = 10; g(1,2) = -20*x(2); g(2,1) = -1; g(3,1) = -20*x(1); g(3,2) = 5*x(2); end end
This code creates the fungrad2 helper function.
function [f,g] = fungrad2(x) f = [10*(x(1) - x(2)^2),1 - x(1),5*(x(2) - x(1)^2)]; if nargout > 1 g = zeros(3,2); g(1,1) = 10; g(1,2) = -20*x(2); g(2,1) = -1; g(3,1) = -10*x(1); g(3,2) = 5; end end
When you provide gradient evaluation functions, nonlinear least-squares solvers such as lsqcurvefit can run faster and more reliably. However, the lsqcurvefit solver has a slightly different syntax for checking gradients compared to other solvers.
Fitting Problem and checkGradient Syntax
To check an lsqcurvefit gradient, instead of passing in the initial point x0 as an array, pass the cell array {x0,xdata}. For example, for the response function , create data ydata from the model with added noise. The response function is fitfun.
function [F,J] = fitfun(x,xdata) F = x(1) + x(2)*exp(-x(3)*xdata); if nargout > 1 J = [ones(size(xdata)) exp(-x(3)*xdata) -xdata.*x(2).*exp(-x(3)*xdata)]; end end
Create xdata as random points from 0 to 10, and ydata as the response plus added noise.
a = 2;
b = 5;
c = 1/15;
N = 100;
rng default
xdata = 10*rand(N,1);
fun = @fitfun;
ydata = fun([a,b,c],xdata) + randn(N,1)/10;Check that the gradient of the response function is correct at the point [a,b,c].
[valid,err] = checkGradients(@fitfun,{[a b c] xdata})valid = logical
1
err = struct with fields:
Objective: [100×3 double]
You can safely use the provided objective gradient. Set the lower bound of all parameters to 0, with no upper bound.
options = optimoptions("lsqcurvefit",SpecifyObjectiveGradient=true);
lb = zeros(1,3);
ub = [];
[sol,res,~,eflag,output] = lsqcurvefit(fun,[1 2 1],xdata,ydata,lb,ub,options)Local minimum possible. lsqcurvefit stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance. <stopping criteria details>
sol = 1×3
2.5872 4.4376 0.0802
res = 1.0096
eflag = 3
output = struct with fields:
firstorderopt: 4.4156e-06
iterations: 25
funcCount: 26
cgiterations: 0
algorithm: 'trust-region-reflective'
stepsize: 1.8029e-04
message: 'Local minimum possible.↵↵lsqcurvefit stopped because the final change in the sum of squares relative to ↵its initial value is less than the value of the function tolerance.↵↵<stopping criteria details>↵↵Optimization stopped because the relative sum of squares (r) is changing↵by less than options.FunctionTolerance = 1.000000e-06.'
bestfeasible: []
constrviolation: []
Nonlinear Constraint Function in lsqcurvefit
The required syntax for nonlinear constraint functions differs from the syntax of the lsqcurvefit objective function. A nonlinear constraint function with gradient has this form:
function [ineqnonlin,eqnonlin,gineqnonlin,geqnonlin] = ccon(x) ineqnonlin = ... eqnonlin = ... if nargout > 2 gineqnonlin = ... geqnonlin = ... end end
The gradient expressions must be of size N-by-Nc, where N is the number of problem variables, and Nc is the number of constraint functions. For example, the ccon function below has just one nonlinear inequality constraint. So, the function returns a gradient of size 3-by-1 for this problem with three variables.
function [ineqnonlin,eqnonlin,gineqnonlin,geqnonlin] = ccon(x) eqnonlin = []; ineqnonlin = x(1)^2 + x(2)^2 + 1/x(3)^2 - 50; if nargout > 2 geqnonlin = []; gineqnonlin = zeros(3,1); % Gradient is a column vector gineqnonlin(1) = 2*x(1); gineqnonlin(2) = 2*x(2); gineqnonlin(3) = -2/x(3)^3; end end
Check whether the ccon function returns a correct gradient at the point [a,b,c].
[valid,err] = checkGradients(@ccon,[a b c],IsConstraint=true)
valid = 1×2 logical array
1 1
err = struct with fields:
Inequality: [3×1 double]
Equality: []
To use the constraint gradient, set options to use the gradient function, and then solve the problem again with the nonlinear constraint.
options.SpecifyConstraintGradient = true; [sol2,res2,~,eflag2,output2] = lsqcurvefit(@fitfun,[1 2 1],xdata,ydata,lb,ub,[],[],[],[],@ccon,options)
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
sol2 = 1×3
4.4436 2.8548 0.2127
res2 = 2.2623
eflag2 = 1
output2 = struct with fields:
iterations: 15
funcCount: 22
constrviolation: 0
stepsize: 1.7914e-06
algorithm: 'interior-point'
firstorderopt: 3.3350e-06
cgiterations: 0
message: 'Local minimum found that satisfies the constraints.↵↵Optimization completed because the objective function is non-decreasing in ↵feasible directions, to within the value of the optimality tolerance,↵and constraints are satisfied to within the value of the constraint tolerance.↵↵<stopping criteria details>↵↵Optimization completed: The relative first-order optimality measure, 1.621619e-07,↵is less than options.OptimalityTolerance = 1.000000e-06, and the relative maximum constraint↵violation, 0.000000e+00, is less than options.ConstraintTolerance = 1.000000e-06.'
bestfeasible: [1×1 struct]
The residual res2 is more than twice as large as the residual res, which has no nonlinear constraint. This result suggests that the nonlinear constraint keeps the solution away from the unconstrained minimum.
Plot the solution with and without the nonlinear constraint.
scatter(xdata,ydata) hold on scatter(xdata,fitfun(sol,xdata),"x") hold off xlabel("x") ylabel("y") legend("Data","Fitted") title("Data and Fitted Response, No Constraint")
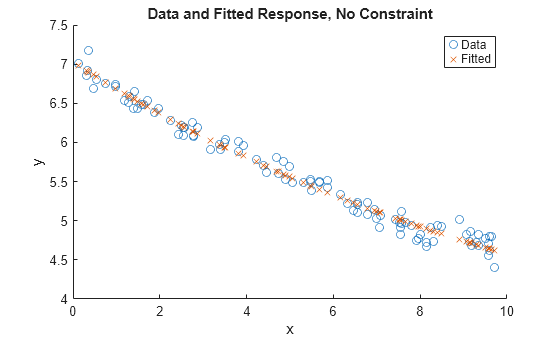
figure scatter(xdata,ydata) hold on scatter(xdata,fitfun(sol2,xdata),"x") hold off xlabel("x") ylabel("y") legend("Data","Fitted with Constraint") title("Data and Fitted Response with Constraint")

Input Arguments
Name-Value Arguments
Output Arguments
More About
Version History
Introduced in R2023b