Train Deep Learning-Based Sampler for Motion Planning
This example shows how to create a deep learning-based sampler using Motion Planning Networks to speed up path planning using sampling-based planners like RRT (rapidly-exploring random tree) and RRT*. For information about Motion Planning Networks (MPNet) for state space sampling, see Get Started with Motion Planning Networks.
Load and Visualize Training Data set
Load the data set from a .mat file. The data set contains 400,000 different paths for 200 maze map environments. The data set has been generated for a pre-defined parameters of mazeMap function. The first column of the data set contains the maps and the second column contains the optimal paths for randomly sampled start, goal states from the corresponding maps. The size of data set is 55MB.
% Download and extract the maze map dataset if ~exist("mazeMapDataset.mat","file") datasetURL = "https://ssd.mathworks.com/supportfiles/nav/data/mazeMapDataset.zip"; websave("mazeMapDataset.zip", datasetURL); unzip("mazeMapDataset.zip") end % Load the maze map dataset load("mazeMapDataset.mat","dataset","stateSpace") head(dataset)
Map Path
______________________ _____________
1×1 binaryOccupancyMap {13×3 single}
1×1 binaryOccupancyMap { 7×3 single}
1×1 binaryOccupancyMap {12×3 single}
1×1 binaryOccupancyMap {10×3 single}
1×1 binaryOccupancyMap { 8×3 single}
1×1 binaryOccupancyMap {11×3 single}
1×1 binaryOccupancyMap {11×3 single}
1×1 binaryOccupancyMap { 9×3 single}
The data set was generated using the examplerHelperGenerateDataForMazeMaps helper function. The examplerHelperGenerateDataForMazeMaps helper function uses the mapMaze function to generate random maze maps of size 10-by-10 and resolution 2.5 m. The width and wall thickness of the maps was set to 5m and 1 m, respectively.
passageWidth = 5; wallThickness = 1; map = mapMaze(passageWidth,wallThickness,MapSize=[10 10],MapResolution=2.5)
Then, the start states and goal states are randomly generated for each map. The optimal path between these states is computed using the plannerRRTStar path planner. To speed up the computational time, we set the maximum number of iterations to 1000. The redundant nodes in the resultant path are then removed using the shortenpath function.
planner = plannerRRTStar(stateSpace,stateValidator); % Uses default uniform state sampling planner.ContinueAfterGoalReached = true; % Optimize after goal is reached planner.MaxIterations = 1000; % Maximum iterations to run the planner shortenedPath = shortenpath(pathObj, stateValidator); % shorten the path
Visualize a few random samples from the training data set. Each sample contains a map and the optimal path generated for a given start and goal state.
figure for i=1:4 subplot(2,2,i) ind = randi(height(dataset)); % Select a random sample map = dataset(ind,:).Map; % Get map from Map column of the table pathStates = dataset(ind,:).Path{1}; % Get path from Path column of the table start = pathStates(1,:); goal = pathStates(end,:); % Plot the data show(map); hold on plot(pathStates(:,1),pathStates(:,2),plannerLineSpec.path{:}) plot(start(1),start(2),plannerLineSpec.start{:}) plot(goal(1),goal(2),plannerLineSpec.goal{:}) title("") end

legend
You can modify the helper function to generate new maps and train the MPNet from scratch. The dataset generation may take a few days depending upon CPU configuration and the number of maps you want to generate for training. To accelerate dataset generation, you can use Parallel Computing Toolbox™. The dataset used in this example was generated in approximately 12 hours using Parallel Computing Toolbox™ on an Intel(R) Xeon(R) W-2133 CPU with 64 GB RAM.
Create Motion Planning Networks
Create Motion Planning Networks (MPNet) object for SE(2) state space using mpnetSE2.
mpnet = mpnetSE2;
Set the StateBounds, LossWeights, and EncodingSize properties of the mpnetSE2 object. Set the StateBounds using the StateBounds property of the stateSpace object.
mpnet.StateBounds = stateSpace.StateBounds;
The loss function is the weighted mean squared loss computed between a predicted next state and the actual state (ground truth) taken from the data set. You must specify the weights for each state space variable , , and of SE(2) state space. For a SE(2) state space, we do not consider the robot kinematics such as the turning radius. Hence, you can assign zero weight value for the variable.
Specify the weights for each state space variables using the LossWeights property of the mpnetSE2 object.
mpnet.LossWeights = [100 100 0];
Specify the value for EncodingSize property of the mpnetSE2 object as [9 9]. Before training the network, the mpnetSE2 object encodes the input map environments to a compact representation of size 9-by-9.
mpnet.EncodingSize = [9 9];
Prepare Data for Training
Split the dataset into train and test sets in the ratio 0.8:0.2. The training set is used to train the Network weights by minimizing the training loss, validation set is used to check the validation loss during the training.
split = 0.8; trainData = dataset(1:split*end,:); validationData = dataset(split*end+1:end,:);
Prepare the data for training by converting the raw data containing the maps and paths into a format required to train the MPNet.
dsTrain = mpnetPrepareData(trainData,mpnet); dsValidation = mpnetPrepareData(validationData,mpnet);
Visualize prepared dataset. The first column of sample contains the encoded map data, encoded current state and goal states. The second column contains the encoded next state. The encoded state is computed as and normalized to the range of [0, 1].
preparedDataSample = read(dsValidation); preparedDataSample(1,:)
Train Deep Learning Network
Use the trainnet function to train the MPNet. Training this network might take a long time depending on the hardware you use. Set the doTraining value to true to train the network.
doTraining = false;
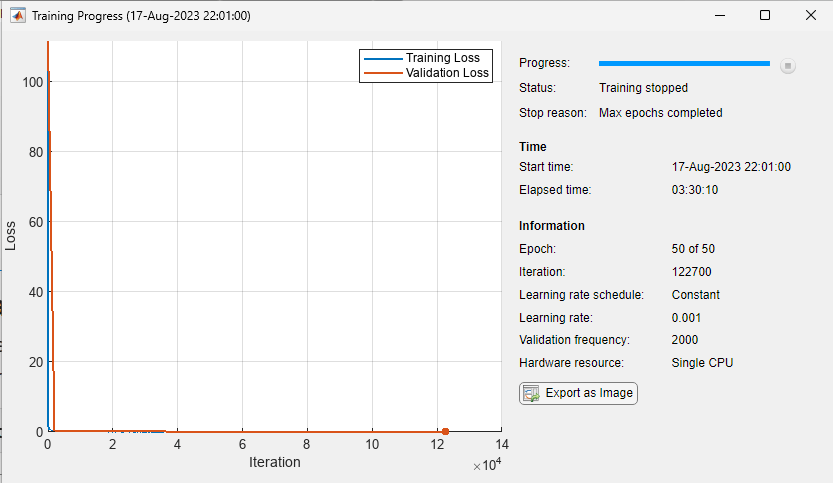
Specify trainingOptions (Deep Learning Toolbox) for training the deep learning network:
Set "adam" optimizer.
Set the
MiniBatchSizefor training to 2048.Shuffle the
dsTrainat every epoch.Set the
MaxEpochsto 50.Set the
ValidationDatatodsValidationandValidationFrequencyto 2000.
You can consider the training to be successful once the training loss and validation loss converge close to zero.
if doTraining options = trainingOptions("adam",... MiniBatchSize=2048,... MaxEpochs=50,... Shuffle="every-epoch",... ValidationData=dsValidation,... ValidationFrequency=2000,... Plots="training-progress"); % Train network [net, info] = trainnet(dsTrain, mpnet.Network, @mpnet.loss, options); % Update Network property of mpnet object with net mpnet.Network = net; end
Alternatively, you can directly use a pretrained MPNet to compute predictions.
Load a .mat file containing the pretrained network. The network has been trained on various, randomly generated maze maps stored in the mazeMapDataset.mat file.
if ~doTraining load("mazeMapTrainedMPNET.mat","trainedNetwork") mpnet.Network = trainedNetwork; end
Create MPNet State Sampler
Create a MPNet state sampler using the state space and the MPNet object as inputs. You can update the Environment, StartState, and GoalState properties to generate samples for new scenarios.
stateSamplerDL = stateSamplerMPNET(stateSpace,mpnet);
Generate Learned Samples on Validation Data
Press the Run button below to generate learned samples for different samples in the test data set.
% Get random sample from testData
ind = randi(height(validationData));
map = validationData(ind,:).Map;
start = double(validationData(ind,:).Path{1,:}(1,:));
goal = double(validationData(ind,:).Path{1,:}(end,:));Set the Environment, StartState, GoalState, MaxLearnedSamples properties for the stateSampler.
stateSamplerDL.Environment = map; stateSamplerDL.StartState = start; stateSamplerDL.GoalState = goal;
You can vary total samples generated by the sampler by adjusting numSamples. You can also vary MaxLearnedSamples(<=numSamples) to visualize the mix of learned samples and uniform samples.
numSamples =100; stateSamplerDL.MaxLearnedSamples =
100;
Press Run button below to generate samples for a new scenario.
 samples = sample(stateSamplerDL, numSamples);
samples = sample(stateSamplerDL, numSamples);Visualize generated samples
figure show(map); hold on; plot(samples(:,1),samples(:,2),plannerLineSpec.state{:}) plot(start(1),start(2),plannerLineSpec.start{:}); plot(goal(1),goal(2),plannerLineSpec.goal{:}); legend(Location="eastoutside")
Conclusion
This example shows how to train a MPNet to generate learned samples for sampling-based planners such as RRT and RRT*. It also shows the data generation process, deep learning network setup, training, and prediction. You can modify this example to use with custom maps and custom datasets. Further, you can extend this for applications like manipulator path planning, 3-D UAV path planning, and more.
To augment sampling-based planners with the deep learning-based sampler to find optimal paths efficiently, See Accelerate Motion Planning with Deep-Learning-Based Sampler example.
See Also
mpnetSE2 | stateSamplerMPNET | mpnetPrepareData
Topics
References
[1] Prokudin, Sergey, Christoph Lassner, and Javier Romero. “Efficient Learning on Point Clouds with Basis Point Sets.” In 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), 3072–81. Seoul, Korea (South): IEEE, 2019. https://doi.org/10.1109/ICCVW.2019.00370.
[2] Qureshi, Ahmed Hussain, Yinglong Miao, Anthony Simeonov, and Michael C. Yip. “Motion Planning Networks: Bridging the Gap Between Learning-Based and Classical Motion Planners.” IEEE Transactions on Robotics 37, no. 1 (February 2021): 48–66. https://doi.org/10.1109/TRO.2020.3006716.
[3] Qureshi, Ahmed H., and Michael C. Yip. “Deeply Informed Neural Sampling for Robot Motion Planning.” In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 6582–88. Madrid: IEEE, 2018. https://doi.org/10.1109/IROS.2018.8593772.