gnssSensor
Simulate GNSS to generate position and velocity readings
Description
The gnssSensor
System object™ simulates a global navigation satellite system (GNSS) to generate position and
velocity readings based on local position and velocity data. The object calculates satellite
positions and velocities based on the sensor time and data that specifies the satellite orbital parameters. The
object uses only the Global Positioning System (GPS) constellations for calculations. To set
the starting positions of the satellites, set the InitialTime property.
To generate GNSS position and velocity readings:
Create the
gnssSensorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Calling the object increments the time of the sensor and propagates the satellite position and velocities based on the orbital parameters.
Creation
Description
GNSS = gnssSensorgnssSensor
System object
GNSS that computes global navigation satellite system receiver
readings based on local position and velocity input.
GNSS = gnssSensor(ReferenceFrame=RF)
GNSS = gnssSensor(___,Name=Value)gnssSensor("SampleRate",2) creates a simulated GNSS with a sample
rate of 2 Hz.
Input Arguments
Properties
Usage
Description
[
computes global navigation satellite system receiver readings from the position and
velocity inputs.positionReadings,velocityReadings,status] = GNSS(position,velocity)
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Generate target positions and velocities based on a waypoint trajectory.
rng(2020) % For repeatable results fs = 0.1; tArrival = 50; tspan = 0:1/fs:tArrival; % Create a waypoint trajectory. trajectory = waypointTrajectory([0,0,0;1,1,1]*500,[0,tArrival]); [positions,~,velocities] = lookupPose(trajectory,tspan)
positions = 6×3
0 0 0
100.0000 100.0000 100.0000
200.0000 200.0000 200.0000
300.0000 300.0000 300.0000
400.0000 400.0000 400.0000
500.0000 500.0000 500.0000
velocities = 6×3
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
Create a GNSS System object. Use the LLA position for Natick, MA, as the local reference frame origin of the trajectory.
refLocNatick = [42.2825 -71.343 53.0352]; gnss = gnssSensor('SampleRate',fs, ... 'ReferenceLocation',refLocNatick);
Generate position and velocity readings based on the GNSS object.
[llaReadings,velocityReadings,status] = gnss(positions,velocities)
llaReadings = 6×3
42.2825 -71.3430 54.8125
42.2834 -71.3418 -46.1998
42.2843 -71.3406 -142.3052
42.2852 -71.3394 -241.6361
42.2861 -71.3381 -347.8848
42.2870 -71.3369 -443.9380
velocityReadings = 6×3
9.9932 9.9820 9.9797
10.0026 9.9906 10.0131
9.9905 10.0282 10.0075
10.0259 9.9931 10.0053
10.0131 9.9811 9.9717
10.0347 9.9912 10.0323
status=6×1 struct array with fields:
SatelliteAzimuth
SatelliteElevation
HDOP
VDOP
Create a GNSS sensor model as a gnssSensor System object™.
gnss = gnssSensor;
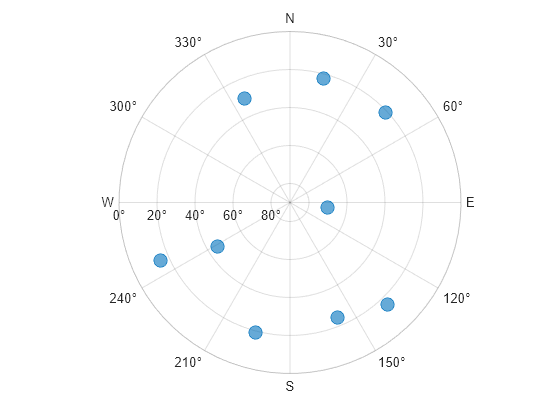
Specify the position and velocity of the sensor. This example assumes a stationary sensor at the position of [0 0 0] in the NED reference frame. Simulate the sensor readings and get the status from visible satellites. Store the azimuth and elevation angles as vectors.
pos = [0 0 0]; vel = [0 0 0]; [~,~,status] = gnss(pos,vel); satAz = status.SatelliteAzimuth; satEl = status.SatelliteElevation;
Plot the satellite positions.
skyplot(satAz,satEl)
More About
References
[1] Groves, Paul D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. 2nd ed, Artech House, 2013.
Extended Capabilities
Version History
Introduced in R2020b