derivative
Beschreibung
stateDot = derivative(kinematicModel,state,cmds)stateDot als dreielementigen Vektor [xDot yDot thetaDot] für ein Fahrradkinematik-Fahrzeugbewegungsmodell kinematicModel zurück. xDot und yDot beziehen sich auf die Fahrzeuggeschwindigkeit, angegeben in Metern pro Sekunde. thetaDot ist die Winkelgeschwindigkeit der Fahrzeugrichtung, angegeben in Radiant pro Sekunde.
Beispiele
Erstellen Sie einen Roboter und legen Sie seine anfängliche Startposition und Ausrichtung fest.
kinematicModel = bicycleKinematics; initialState = [0 0 0];
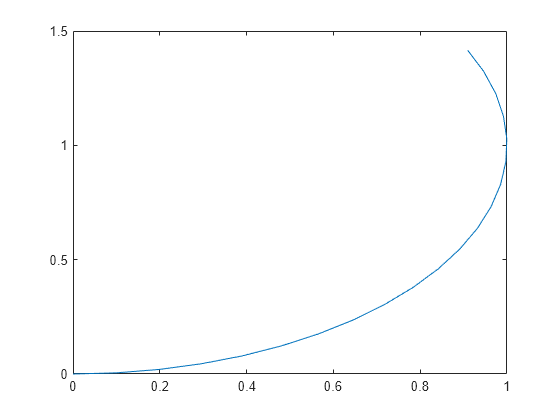
Stellen Sie die Zeitspanne der Simulation auf 1 s mit Zeitschritten von 0,05 s und die Eingabebefehle auf 2 m/s für die Fahrzeuggeschwindigkeit und pi/4 rad für den Lenkwinkel ein, um eine Linkskurve zu erzeugen. Simulieren Sie die Bewegung des Roboters, indem Sie den ode45-Solver auf die derivative-Funktion anwenden.
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Planen Sie den Pfad.
figure plot(y(:,1),y(:,2))
Eingabeargumente
Ausgabeargumente
Referenzen
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. 1st ed. Cambridge, MA: Cambridge University Press, 2017.
Erweiterte Fähigkeiten
Versionsverlauf
Eingeführt in R2021b