accelcal
Syntax
Beschreibung
[ gibt die Matrix A,b] = accelcal(D)A und den Vektor b zurück, die zur Korrektur unkalibrierter Beschleunigungsmessungen auf Basis der Kalibrierungsdaten D verwendet werden.
Nachdem A und b ermittelt wurden, werden die kalibrierten Daten C aus den unkalibrierten Daten U mithilfe der Formel C = U*A + b berechnet, wobei U eine 3-mal-3-Matrix ist und jede Zeile von U eine unkalibrierte Beschleunigungsmessung darstellt.
Beispiele
Eingabeargumente
Ausgabeargumente
Mehr über
Um die Messdaten für die Kalibrierung des Beschleunigungsmessers zu erhalten, richten Sie die Ausrichtung des Messrahmens (X-Y-Z) des Beschleunigungsmessers an einer der sechs in diesem Diagramm gezeigten Ausrichtungen aus. Um beispielsweise eine x-up-Messung zu erhalten, richten Sie die positive X-Richtung des Beschleunigungsmessrahmens entgegen der Richtung der Schwerkraft aus, wie in der ersten Abbildung gezeigt.
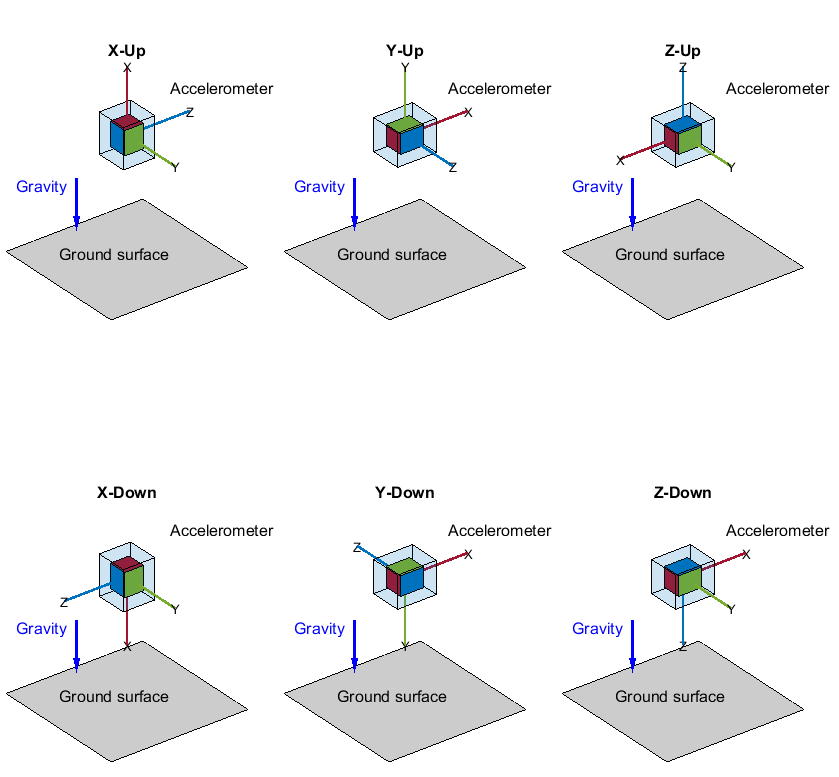
Wenn der Beschleunigungsmesser keine Kalibrierungsfehler aufweist und sein Messrahmen perfekt ausgerichtet ist, wie in der Abbildung gezeigt, können Sie in dieser Tabelle ideale Messwerte erhalten.
| Orientierung | aX | aY | aZ |
|---|---|---|---|
| X-Up | -g | 0 | 0 |
| X-Down | +g | 0 | 0 |
| Y-Up | 0 | -g | 0 |
| Y-Down | 0 | +g | 0 |
| Z-Up | 0 | 0 | -g |
| Z-Down | 0 | 0 | +g |
In der Tabelle bezeichnen aX, aY und aZ die Beschleunigungskomponenten in X-, Y- bzw. Z-Richtung. g ist die lokale Erdgravitationskonstante.
Referenzen
[1] AN4508 Application Note: Parameters and Calibration of a Low-G 3-Axis Accelerometer.
Versionsverlauf
Eingeführt in R2023b