Lokalisierung
Diese Beispiele nutzen Sensorfusions- und Filtertechniken, um Plattformen mithilfe von IMU-, GPS- und Kameradaten zu lokalisieren.
Enthaltene Beispiele
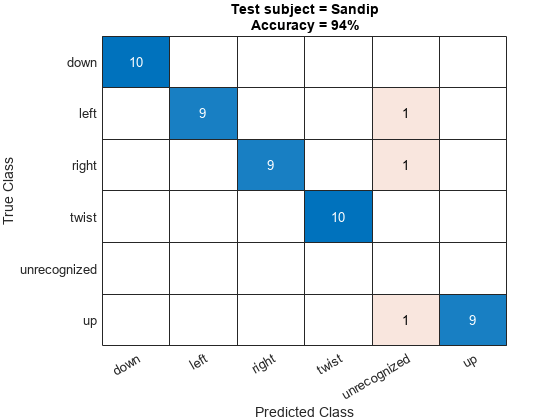
Gesture Recognition Using Inertial Measurement Units
Recognize gestures based on a handheld inertial measurement unit (IMU). Gesture recognition is a subfield of the general Human Activity Recognition (HAR) field. In this example, you use quaternion dynamic time warping and clustering to build a template matching algorithm to classify five gestures.
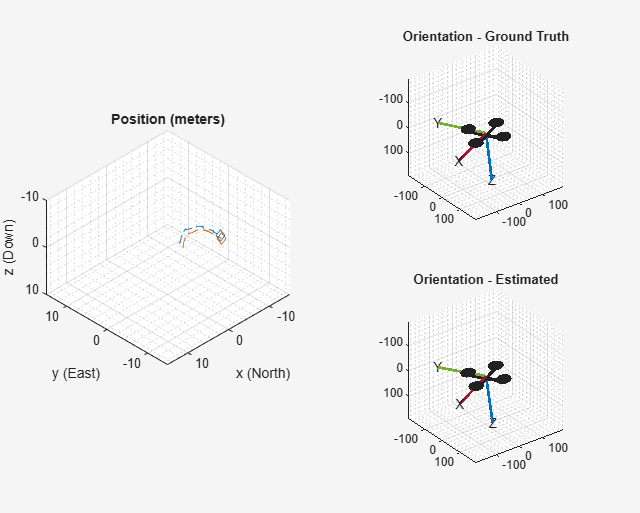
IMU- und GPS-Fusion für die Trägheitsnavigation
Dieses Beispiel zeigt, wie Sie einen IMU + GPS-Fusionsalgorithmus erstellen können, der für unbemannte Luftfahrzeuge (UAVs) oder Quadcopter geeignet ist.
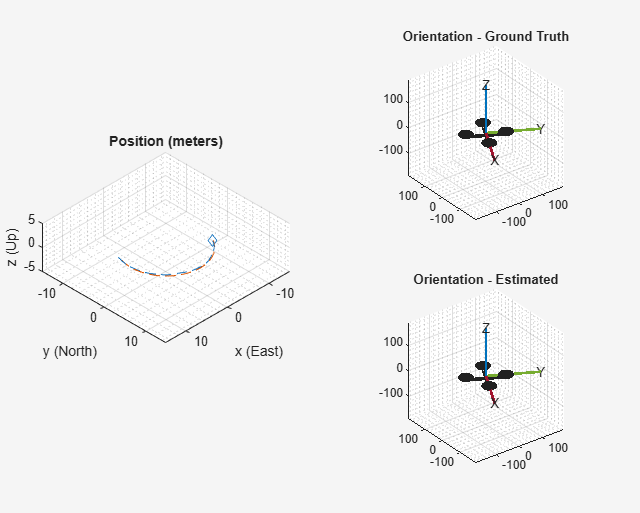
Position und Ausrichtung eines Bodenfahrzeugs abschätzen
Dieses Beispiel zeigt, wie man die Position und Orientierung von Bodenfahrzeugen durch die Fusion von Daten einer Inertialmesseinheit (IMU) und eines globalen Positionierungssystems (GPS) schätzen kann.

Visual-Inertial Odometry Using Synthetic Data
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera. In this example, you: