Field-Weakening Control (with MTPA) of Nonlinear PMSM Using Lookup Table
This example uses a lookup table (LUT) for a nonlinear permanent magnet synchronous motor (PMSM) and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity PMSM in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
This image shows the MTPA and field-weakening operating points for an interior PMSM (IPMSM).
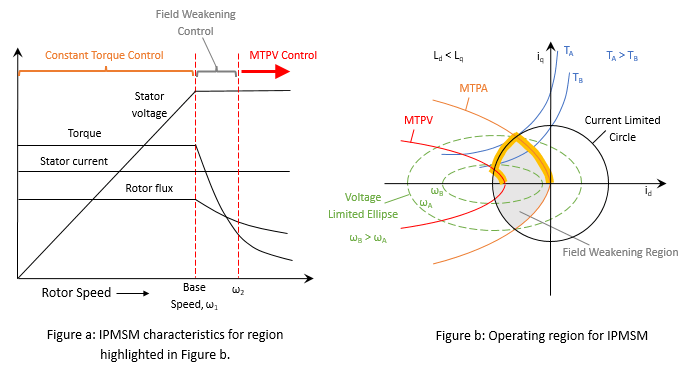
(The preceding image is for illustration purposes only and is not to scale.)
Traditionally, to generate optimal reference current data you required an actual motor and hardware in a dyno setup. But using an actual PMSM and hardware to design a motor as well as the control algorithm can be impractical due to higher operation costs and time, safety issues, as well as sporadic machine and inverter failures. This example effectively solves these problems by using a simulation-based model driven by an LUT that contains motor parameter data. It uses an LUT that contains Ld and Lq data with respect to currents id and iq.
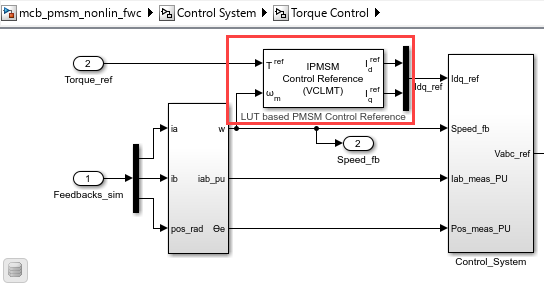
The example uses the LUT based PMSM Control Reference block that utilizes the PMSM's nonlinear inductance and permanent magnet flux linkage data to design and implement flux-weakening torque control id (torque, speed) and iq (torque, speed) LUTs by using iterative analytical methods.
By default, this example uses tabulated motor characterization data generated based on lumped parameter values. However, as an alternative, you can configure the LUT based PMSM Control Reference block and generate your own reference current id (torque, speed) and iq (torque, speed) LUT and use it in the same example.
You can use the example to simulate the LUT-based motor model and run tests to design the control algorithm. This enables you to run challenging tests easily and perform robust machine and control algorithm validation, which in turn reduces the time required for hardware testing and saves the overall development time.
You can use precalibrated reference current LUT data files for nonlinear PMSMs in the example model. Because solving the underlying motor equations for nonlinear high-performance motors is computation intensive, the example relies on LUTs generated by solving these (non-approximated) equations. This enables you to run control algorithms on the controller hardware with high accuracy (because LUT data mimics the actual nonlinear motor characteristics).
Using this approach, you can reduce the complexities that occur when the algorithm relies on the controller hardware to solve approximated equations for nonlinear PMSM.
The example helps you build a field-weakening (with MTPA) control algorithm that can compensate for the reduced torque caused by nonlinearity resulting from a magnetically saturated PMSM stator core.
For more details about these operating regions, see Field-Weakening Control (with MTPA) of PMSM and PMSM Drive Characteristics and Constraint Curves.
Model
This example includes the
mcb_pmsm_nonlin_fwc Simulink® model.
You can use this model only for simulation.

Required MathWorks Products
Motor Control Blockset™
Simscape™ Electrical™
About LUT Data Files
By default, the example uses the following LUT data file, which is loaded and read by the model initialization script mcb_pmsm_nonlin_fwc_data.m associated with the example model:
* |IPMSM_template_data.mat|
For more details, see the System Parameters section of the model initialization script.
The following blocks in the example model use the loaded LUT data:
mcb_pmsm_nonlin_fwc/Control System/Torque Control/LUT based PMSM Control Reference— Uses the reference current LUTs derived from the inductance LUTs.
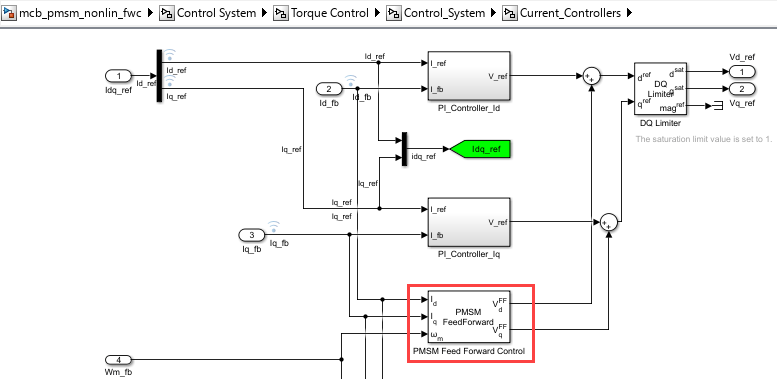
mcb_pmsm_nonlin_fwc/Control System/Torque Control/Control_System/Current_Controllers/PMSM Feed Forward Control— Uses the inductance LUTs.
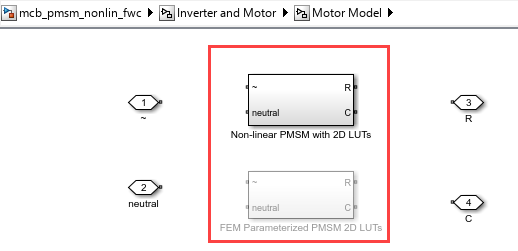
mcb_pmsm_nonlin_fwc/Inverter and Motor/Motor Model
- Non-linear PMSM with 2D LUTs — This motor model uses a PMSM (Simscape Electrical) block from Simscape Electrical that extracts and uses 2D data (id, iq) from the loaded .mat file.
- FEM Parameterized PMSM 2D LUTs — This motor model uses the FEM-Parameterized PMSM (Simscape Electrical) block from Simscape Electrical that extracts and uses 2D data (id, iq) from the loaded .mat file.
Simulate Model
1. Open the Simulink model mcb_pmsm_nonlin_fwc.slx associated with this example.
2. Use the Motor Plant Model radio button in the example model to select the motor model that you want to simulate using the LUT data:
a. Non-linear PMSM with 2D LUTs
b. FEM Parameterized PMSM with 2D LUTs
3. Click Run on the Simulation tab to simulate the model.
4. Set the reference speed and reference torque values using the Speed Reference (RPM) and Torque Reference (Nm) knobs.
5. Click Data Inspector on the Simulation tab to view and analyze the simulation results.
Note: Use the slide bar in the model, to simulate the example using a different operating voltage of a battery (to match the real-life conditions).
Generate LUT Data File for Custom Motor Design
The following procedure explains the steps needed to obtain the inductance LUT data set (either manually generated or downloaded from JMAG) and use it with the same or a similar example model.
1. Obtain the .rtt file and RT-Viewer tool:
a. Download the LUT data set (.rtt file) for your motor from the JMAG-RT Model Library. The data set includes the Ld, Lq maps.
Note: Downloading and using this file requires Type-2 (free) license that you can obtain by requesting for it.
b. Click JMAG-RT Viewer to obtain the RT-Viewer tool.
2. Use the RT Viewer tool to open the .rtt file and export the Ld and Lq table values into an identical grid of the id and iq values. For example, save the Ld and Lq table values as JMAG_Ld.csv and JMAG_Lq.csv.
a. In the RT Viewer tool menu, select Table Value > Inductance > Id-Iq-Ld.
b. In the Map Window menu, select File > CSV Export to open the CSV Export window.
c. In the CSV Export window, provide id and iq grid details and the file name to proceed with the data export.
Note: If you have a manually-generated LUT data set, skip steps numbered 1 and 2.
3. In the model initialization script associated with the Simulink model, create template structures for the PMSM and inverter as shown below:
pmsm = mcb_SetPMSMMotorParameters('Teknic2310P');
inverter = mcb_SetInverterParameters("BoostXL-DRV8305");
pmsm.B = pmsm.B*100; % increasing the viscous damping coefficient since this is a bigger motor than the Teknic2310p.
4. In the script, find the motor parameters and update the following fields:
pmsm.p (pole pairs)
pmsm.Rs (stator/coil resistance)
pmsm.Ld (d_inductance)
pmsm.Lq (q_inductance)
pmsm.J (inertia)
pmsm.FluxPM (magflux)
pmsm.I_rated (rated_current)
inverter.V_dc (rated_voltage)
5. Calculate the rated torque value using the following function:
pmsm.T_rated = mcbPMSMRatedTorque(pmsm);
6. Create a seed structure with the file paths to read the .csv files that you created in step 2.
seed.Ldfilepath = 'JMAG_Ld.csv';
seed.Lqfilepath = 'JMAG_Lq.csv';
Note: If you are using a manually-generated inductance LUT data set, use the paths to the associated .csv files instead.
7. Create LUTs using the following API:
PMSMLUT = mcbGenerateTables(pmsm,inverter,'jmagindfiles2inddq',seed);
This command converts the .csv files generated by the JMAG-RT Viewer into a regular matrix, filling the empty places using extrapolation. Because we also need the permanent magnet flux linkage (FluxPM) in the same LUT format, create an array using the following command:
PMSMLUT.FluxPMTable = pmsm.FluxPM*ones(size(PMSMLUT.LdTable));
8. Configure the following blocks in the example model to use the nonlinear LUTs:
- LUT based PMSM Control Reference — In the block dialog box, set the Motor parameter input method parameter to Non-linear model with id and iq LUTs.
- PMSM Feed Forward Control — In the block dialog box, set the Motor parameter input method parameter to Non-linear model with Ld, Lq and FluxPM LUTs.
- PMSM Torque Estimator — In the block dialog box, set the Motor parameter input method parameter to Non-linear model with Ld, Lq and FluxPM LUTs.
9. In the example model, create a plant using the FEM-Parameterized PMSM block.
10. In the FEM-Parameterized PMSM block dialog box, set the Modelling option parameter to 2-D partial derivative data | No thermal port.
11. In the Electrical section of the block dialog box, set the Parameterization parameter to Assume sinusoidal back emf - tabulate with d- and q- axis currents.
12. To generate the id and iq LUTs from inductance LUT data, use the following command:
PMSMLUT=mcbGenerateTables(pmsm,inverter,'idiqLUTs',seed);
For more details about the structure of the variable seed, use the MATLAB command help mcbGenerateTables.
Alternatively, you can also use Model-Based Calibration Toolbox™ to calibrate the PMSM and generate the id and iq LUTs. For more information see Preprocess Permanent Magnet Synchronous Motor (PMSM) Data and Autogenerate Current Controller Calibration Tables (Model-Based Calibration Toolbox).
13. In the model initialization script, populate the PMSM LUT fields at appropriate places depending on the parameter input method:
PMSMLUT.idVec
PMSMLUT.iqVec
PMSMLUT.LdTable
PMSMLUT.LqTable
PMSMLUT.FluxPMTable
or
PMSMLUT.trefVec
PMSMLUT.wrpmVec
PMSMLUT.idTable
PMSMLUT.iqTable
14. Similarly, populate the rest of the motor parameters at their respective places.
15. For the PMSM plant model:
- Maintain the default value for the stator zero sequence inductance.
- Update the variables pmsm.B and pmsm.J in the mechanical parameters section.
- Set initial targets for rotor speed and rotor position to 0.