recursiveLS
Online parameter estimation of least-squares model
Description
Use the recursiveLS
System object™ for parameter estimation with real-time data using a recursive least-squares
algorithm. If all the data you need for estimation is available at once and you are estimating
a time-invariant model, use the offline function mldivide.
To perform parameter estimation with real-time data:
Create the
recursiveLSobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
lsobj = recursiveLS
y(t) = H(t)θ(t)+e(t).
Here, y is the output, θ are the parameters,
H are the regressors, and e is the white-noise
disturbance. The default system has one parameter with initial parameter value
1.
lsobj = recursiveLS(np)NumberOfParameters property to np.
lsobj = recursiveLS(np,theta0)InitialParameters property to theta0.
lsobj = recursiveLS(___,Name=Value)lsobj = recursiveLS(2,EstimationMethod="NormalizedGradient") creates
an estimation object that uses a normalized gradient estimation method.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes. For example, lsobj =
recursiveLS(2,"EstimationMethod","NormalizedGradient") creates an estimation
object that uses a normalized gradient estimation method.
Properties
Usage
Description
[
updates and returns the parameters and output of theta,estimatedOutput] = lsobj(y,H)recursiveLS model
lsobj based on real-time output data y and
regressors H.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
obj = recursiveLS
obj =
recursiveLS with properties:
NumberOfParameters: 1
Parameters: []
InitialParameters: 1
ParameterCovariance: []
InitialParameterCovariance: 10000
EstimationMethod: 'ForgettingFactor'
ForgettingFactor: 1
EnableAdaptation: true
History: 'Infinite'
InputProcessing: 'Sample-based'
DataType: 'double'
The system has two parameters and is represented as:
.
Here,
and are the real-time input and output data, respectively.
and are the regressors,
H, of the system.and are the parameters,
theta, of the system.
Create a System object for online estimation using the recursive least squares algorithm.
obj = recursiveLS(2);
Load the estimation data, which for this example is a static data set.
load iddata3
input = z3.u;
output = z3.y;Create a variable to store u(t-1). This variable is updated at each time step.
oldInput = 0;
Estimate the parameters and output using step and input-output data, maintaining the current regressor pair in H. Invoke the step function implicitly by calling the obj System object with input arguments.
for i = 1:numel(input) H = [input(i) oldInput]; [theta, EstimatedOutput] = obj(output(i),H); estimatedOut(i)= EstimatedOutput; theta_est(i,:) = theta; oldInput = input(i); end
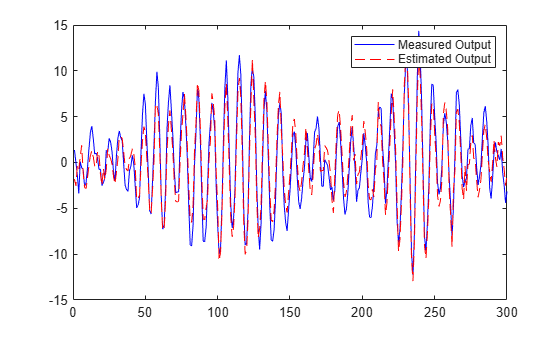
Plot the measured and estimated output data.
numSample = 1:numel(input); plot(numSample,output,'b',numSample,estimatedOut,'r--'); legend('Measured Output','Estimated Output');
Plot the parameters.
plot(numSample,theta_est(:,1),numSample,theta_est(:,2)) title('Parameter Estimates for Recursive Least Squares Estimation') legend("theta1","theta2")
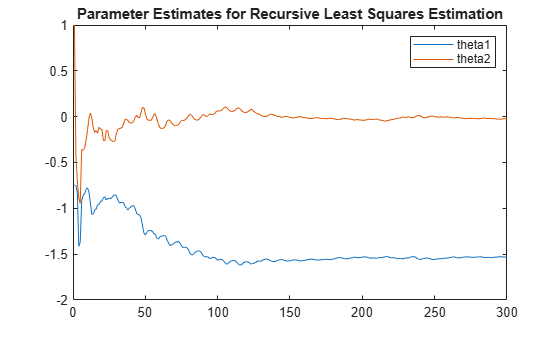
View the final estimates.
theta_final = theta
theta_final = 2×1
-1.5322
-0.0235
Use frame-based signals with the recursiveLS command. Machine interfaces often provide sensor data in frames containing multiple samples, rather than in individual samples. The recursiveLS object accepts these frames directly when you set InputProcessing to Frame-based.
The object uses the same estimation algorithms for sample-based and frame-based input processing. The estimation results are identical. There are some special considerations, however, for working with frame-based inputs.
This example is the frame-based version of the sample-based recursiveLS example in Estimate Parameters of System Using Recursive Least Squares Algorithm.
The system has two parameters and is represented as:
.
Here,
and are the real-time input and output data, respectively.
and are the regressors,
H, of the system.and are the parameters,, of the system.
Create a System object for online estimation using the recursive least squares algorithm.
obj_f = recursiveLS(2,'InputProcessing','Frame-Based');
Load the data, which contains input and output time series signals. Each signal consists of 30 frames and each frame contains ten individual time samples.
load iddata3_frames input_sig_frame output_sig_frame input = input_sig_frame.data; output = output_sig_frame.data; numframes = size(input,3)
numframes = 30
mframe = size(input,1)
mframe = 10
Initialize the regressor frame, which for a given frame, is of the form
,
where the most recent point in the frame is .
Hframe = zeros(10,2);
For this first-order example, the regressor frame includes one point from the previous frame. Initialize this point.
oldInput = 0;
Estimate the parameters and output using step and input-output data, maintaining the current regressor frame in Hframe.
The input and output arrays have three dimensions. The third dimension is the frame index, and the first two dimensions represent the contents of individual frames.
Use the
circshiftfunction to populate the second column ofHframewith the pastinputvalue for each regressor pair by shifting the input vector by one position.Populate the
Hframeelement holding the oldest value,Hframe(1,2), with the regressor value stored from the previous frame.Invoke the
stepfunction implicitly by calling theobjSystem object with input arguments. Thestepfunction is compatible with frames, so no loop function within the frame is necessary.Save the most recent input value to use for the next frame calculation.
EstimatedOutput = zeros(10,1,30); theta = zeros(2,30); for i = 1:numframes Hframe = [input(:,:,i) circshift(input(:,:,i),1)]; Hframe(1,2) = oldInput; [theta(:,i), EstimatedOutput(:,:,i)] = obj_f(output(:,:,i),Hframe); oldInput = input(10,:,i); end
Plot the parameters.
theta1 = theta(1,:); theta2 = theta(2,:); iframe = 1:numframes; plot(iframe,theta1,iframe,theta2) title('Frame-Based Recursive Least Squares Estimation') legend('theta1','theta2','location','best')
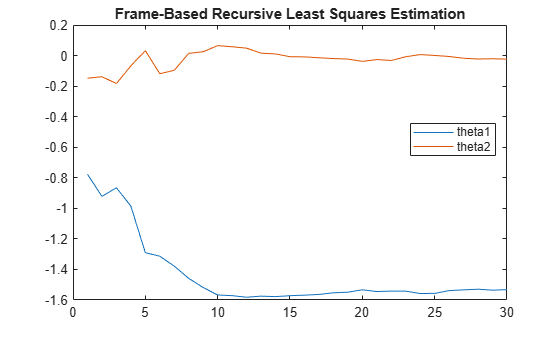
View the final estimates.
theta_final = theta(:,numframes)
theta_final = 2×1
-1.5322
-0.0235
The final estimates are identical to the sample-based estimation.
Create System object for online parameter estimation using recursive least squares algorithm of a system with two parameters and known initial parameter values.
obj = recursiveLS(2,[0.8 1],'InitialParameterCovariance',0.1);InitialParameterCovariance represents the uncertainty in your guess for the initial parameters. Typically, the default InitialParameterCovariance (10000) is too large relative to the parameter values. This results in initial guesses being given less importance during estimation. If you have confidence in the initial parameter guesses, specify a smaller initial parameter covariance.
Extended Capabilities
Version History
Introduced in R2015b