data2state
Map past data to states of state-space and nonlinear ARX models
Description
X = data2state(sys,PastData)sys.
PastData can be a timetable, a comma-separated input/output matrix pair, or a
time-domain iddata object.
For timetables and data objects, data2state matches the
input/output channels based on the channel names in sys and
ignores nonmatching channels.
X contains the state values at the time instant immediately
after the most recent data sample in PastData. The software
computes the state estimates by minimizing the 1-step ahead prediction error between
predicted response and output signal in PastData.
data2state is useful for continued model
simulation. That is, suppose you have simulated a model up to a certain
time instant and would like to then simulate the model for future
inputs. Use data2state to estimate states of
the model at the beginning of the second simulation.
Examples
Compute the mapped states of an identified model, and use the states as initial state values for model simulation.
Load estimation data.
load iddata3 z3
Estimate a second-order state-space model using the data.
sys = ssest(z3,2);
Simulate the model using the entire input signal in z3.
Input = z3(:,[],:); % |iddata| object containing only the input signal
y_all = sim(sys,Input);sim uses zero initial conditions to compute y_all.
Now simulate the model using only the first-half of the input signal.
Input1 = Input(1:150); y_1 = sim(sys,Input1);
Continue the simulation with the second-half of the input signal such that the results show no discontinuity owing to initial-condition-induced transients. To do so, first construct a past data set comprising of the input and simulated output from the first-half of the input signal. Then calculate the state values corresponding to the start of the second-half of the input signal (t = 151).
PastData = [y_1,Input1]; X = data2state(sys,PastData);
X contains the state values at the time instant immediately after the most recent data sample in PastData. This time point is also the start of the future data (second-half of the input signal).
FutureData = Input(151:end);
Simulate the model using the second-half of the input signal and X as initial conditions.
opt = simOptions('InitialCondition',X);
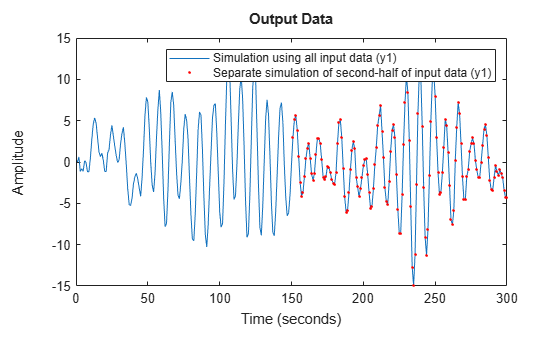
y_2 = sim(sys,FutureData,opt);Verify that y_2 matches the second half of y_all.
plot(y_all,y_2,'r.') legend('Simulation using all input data',... 'Separate simulation of second-half of input data')
Load the past data.
load iddata1 z1 PastData = z1;
Estimate an ARX model.
sys = arx(PastData,[1 1 0]);
Convert the model to a state-space model.
sys2 = idss(sys);
Calculate the mapped states and covariance of states using PastData.
[X,XCov] = data2state(sys2,PastData);
X is the state value at the time instant immediately after the most recent data sample in PastData.
Load your data and create a data object.
load motorizedcamera; z = iddata(y,u,0.02,'Name','Motorized Camera','TimeUnit','s');
Estimate a nonlinear ARX model.
mw1 = nlarx(z,[ones(2,2),ones(2,6),ones(2,6)],'idWaveletNetwork');The estimated model has six inputs and two outputs.
Determine the model order, nx.
nx = order(mw1);
Use the first nx samples of data to generate initial conditions.
PastData = struct('Input', z.u(1:nx,:),'Output',z.y(1:nx,:));
Compute the mapped states of the model.
X = data2state(mw1,PastData);
X is the state value at the time instant immediately after the most recent data sample in PastData.
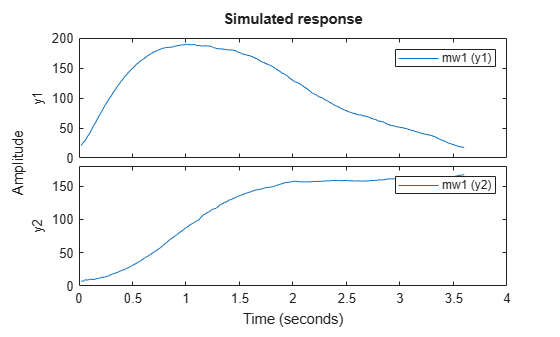
Simulate the model using the remaining input data, and specify the initial conditions for simulation.
InputSignal = z.u(nx+1:end,:); opt = simOptions; opt.InitialCondition = X; sim(mw1,InputSignal,opt)
Input Arguments
Output Arguments
Version History
Introduced in R2008aSee Also
idnlarx/findop | findstates | getDelayInfo | sim | order