Schätzen von Prozessmodellen
Schätzung eines zeitkontinuierlichen Prozessmodells für ein System mit einem Eingang und einem Ausgang (SISO) entweder in der Zeit- oder Frequenzdomäne im Live Editor
Beschreibung
Mit dem Task Estimate Process Model (Prozessmodell schätzen) können Sie interaktiv ein Prozessmodell für SISO-Systeme schätzen und validieren. Sie können die Modellstruktur definieren und variieren und optionale Parameter wie die Handhabung der Anfangsbedingungen und die Suchmethoden angeben. Der Task generiert automatisch MATLAB®-Code für Ihr Live-Skript. Weitere Informationen zu Live Editor Tasks im Allgemeinen finden Sie unter Add Interactive Tasks to a Live Script.
Prozessmodelle sind einfache zeitkontinuierliche Transferfunktionen, die die lineare Systemdynamik beschreiben. Zu den Prozessmodellelementen gehören statische Verstärkung, Zeitkonstanten, Zeitverzögerungen, Integrator und Prozessnullpunkt.
Prozessmodelle werden in zahlreichen Branchen zur Beschreibung der Systemdynamik eingesetzt und sind auf verschiedene Produktionsumgebungen anwendbar. Die Vorteile dieser Modelle sind, dass sie einfach sind, dass sie die Schätzung der Transportverzögerung unterstützen und dass die Modellkoeffizienten leicht als Pole und Nullstellen zu interpretieren sind. Weitere Informationen über die Schätzung von Prozessmodellen finden Sie unter What Is a Process Model?
Der Task Estimate Process Model (Prozessmodell schätzen) ist unabhängig von der allgemeineren System Identification-App. Verwenden Sie die System Identification-App, wenn Sie Schätzungen für mehrere Modellstrukturen berechnen und vergleichen möchten.
Laden Sie zunächst die Experimentdaten, die Eingabe- und Ausgabedaten enthalten, in Ihren MATLAB-Workspace und importieren Sie diese Daten dann in den Task. Wählen Sie dann eine zu schätzende Modellstruktur aus. Der Task gibt Ihnen Kontrollen und Diagramme an die Hand, mit denen Sie mit verschiedenen Modellstrukturen experimentieren und vergleichen können, wie gut die Ergebnisse der einzelnen Modelle mit den Messungen übereinstimmen.
Öffnen Sie die Aufgabe
So fügen Sie die Aufgabe Estimate Process Model (Prozessmodell schätzen) zu einem Live-Skript im MATLAB Editor hinzu:
Wählen Sie auf der Registerkarte Live Editor die Option Task > Estimate Process Model.
Geben Sie in einen Codeblock in Ihrem Skript ein relevantes Schlüsselwort ein, z. B
processoderestimate. Wählen SieEstimate Process Modelaus den vorgeschlagenen Befehlsergänzungen.
Beispiele
Verwenden Sie den Live Editor Task Estimate Process Model (Prozessmodell schätzen), um ein Prozessmodell zu schätzen und die Modellausgabe mit den Messdaten zu vergleichen.
Einrichten der Daten
Laden Sie die Messdaten tt1 in Ihren MATLAB-Workspace. tt1 ist ein Timetable, der eine Eingangsvariable u und eine Ausgangsvariable y enthält.
load sdata1 tt1
Importieren von Daten in den Task
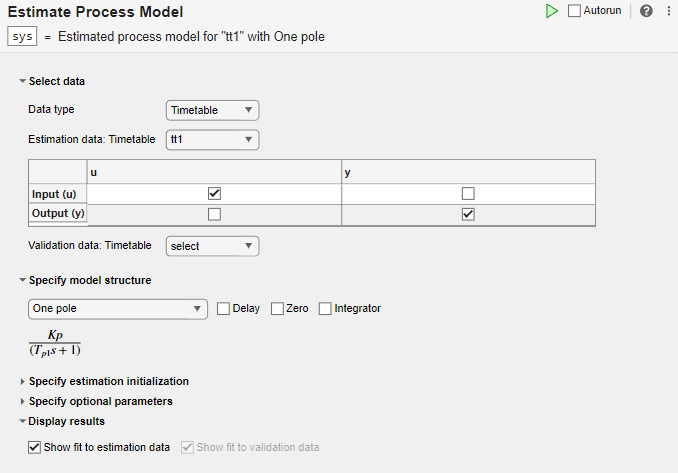
Setzen Sie im Abschnitt Select data (Daten auswählen) den Datentyp auf Timetable und setzen Sie Estimation data (Schätzdaten) auf tt1.

Der Task zeigt eine Tabelle mit den Namen der tt1-Eingangs- und -Ausgangsvariablen an.
Schätzen des Modells mit Standardeinstellungen
Untersuchen Sie die Modellstruktur und die optionalen Parameter.

Im Abschnitt Specify model structure (Modellstruktur angeben) ist die Standardoption One Pole (Ein Pol) ohne Verzögerung, Nullstelle oder Integrator. Die Gleichungen unterhalb der Parameter in diesem Abschnitt zeigen die festgelegte Struktur an.
Im Abschnitt Specify estimation initialization (Initialisierung der Schätzung festlegen) können Sie mit Hilfe von Initialisierungsparametern, die den Parametern Ihrer Modellstruktur entsprechen, Startpunkte für die Schätzung festlegen. Wenn Sie Fix (Fixieren) wählen, bleibt der Parameter auf den von Ihnen angegebenen Wert fixiert. Bei diesem Beispiel sollten Sie keine Initialisierung angeben. Der Task verwendet dann Standardwerte als Startpunkte.
Im Abschnitt Specify optional parameters (Optionale Parameter angeben) werden die Standardoptionen für die Prozessabschätzung festgelegt.
Führen Sie die Aufgabe auf der Registerkarte Live Editor aus, indem Sie auf den grünen Pfeil klicken. Sie können auch Autorun wählen, damit der Task automatisch bei jeder Aktualisierung eines Parameters ausgeführt wird.
![]()
Ein Diagramm zeigt die Schätzdaten, die geschätzte Modellausgabe und den Anpassungsprozentsatz an.

Experimentieren mit Parametereinstellungen
Experimentieren Sie mit den Parametereinstellungen und stellen Sie fest, wie sie die Anpassung beeinflussen.
Fügen Sie zum Beispiel eine Verzögerung zur One Pole-Struktur hinzu und führen Sie den Task aus.


Die Passgenauigkeit der Schätzung verbessert sich, obwohl der Prozentsatz der Passgenauigkeit immer noch unter 50% liegt.
Versuchen Sie es mit einer anderen Modellstruktur. Wählen Sie unter Specify model structure (Modellstruktur angeben) Underdamped Pair ohne Verzögerung und führen Sie den Task aus.


Die Anpassungsergebnisse verbessern sich erheblich.
Generieren von Code
Um den vom Task erzeugten Code anzuzeigen, klicken Sie auf ![]() am unteren Ende des Parameterbereichs. Der Code, den Sie sehen, spiegelt die aktuelle Parameterkonfiguration des Task wider.
am unteren Ende des Parameterbereichs. Der Code, den Sie sehen, spiegelt die aktuelle Parameterkonfiguration des Task wider.

Verwenden Sie separate Schätz- und Validierungsdaten, um das geschätzte Prozessmodell zu validieren.
Einrichten der Daten
Laden Sie die Messdaten sdata1 in Ihren MATLAB-Workspace und untersuchen Sie deren Inhalt.
load sdata1 umat1 ymat1 Ts
Teilen Sie die Daten in zwei Sätze auf, wobei eine Hälfte zur Schätzung und die andere Hälfte zur Validierung verwendet wird. Der ursprüngliche Datensatz umfasst 300 Abtastungen, folglich umfassen die beiden neuen Datensätze je 150 Abtastungen.
u_est = umat1(1:150); u_val = umat1(151:300); y_est = ymat1(1:150); y_val = ymat1(151:300); Ts
Ts = 0.1000
Importieren von Daten in den Task
Setzen Sie im Abschnitt Select data (Daten auswählen) den Datentyp auf „Numeric“ (Numerisch). Stellen Sie die Abtastzeit auf 0.1 Sekunden. Wählen Sie die geeigneten Datensätze für die Schätzung und Validierung aus.

Schätzen und Validieren des Modells
Das Beispiel Schätzung des Prozessmodells mit Live Editor Task erzielt die besten Ergebnisse bei der Verwendung der Modellstruktur Underdamped Pair. Wählen Sie für dieses Beispiel die gleiche Option.

Führen Sie den Task aus. Bei der Ausführung des Task werden zwei Plots erstellt. Das erste Diagramm zeigt die Ergebnisse der Schätzung und das zweite Diagramm die Ergebnisse der Validierung.

Die Anpassung an die Schätzungsdaten ist etwas schlechter als bei Schätzung des Prozessmodells mit Live Editor Task. Für die Schätzung im vorliegenden Beispiel steht nur die Hälfte der Daten zur Verfügung, mit denen das Modell geschätzt werden kann. Die Anpassung an die Validierungsdaten, die die Güte des Modells im Allgemeinen darstellt, ist besser als die Anpassung an die Schätzdaten.