Lidar-Verarbeitung
Wenden Sie Deep-Learning-Algorithmen zur Verarbeitung von Lidar-Punktwolkendaten an, indem Sie die Deep Learning Toolbox™ zusammen mit der Lidar Toolbox™ verwenden.
Apps
| Lidar Labeler | Label ground truth data in lidar point clouds |
Funktionen
Enthaltene Beispiele

Aerial Lidar Semantic Segmentation Using RandLANet Deep Learning
Train a RandLANet deep learning network to perform semantic segmentation on aerial lidar data.

Lidar Object Detection Using Complex-YOLO v4 Network
Detect objects in point clouds using you only look once version 4 (YOLO v4) deep learning network. In this example, you:
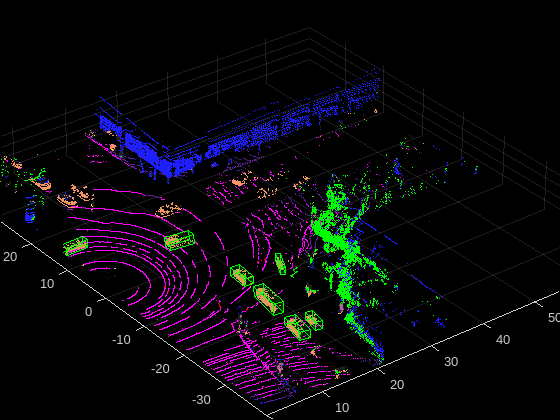
Code Generation for Lidar Object Detection Using SqueezeSegV2 Network
Generate CUDA® MEX code for a lidar object detection network. In the example, you first segment the point cloud with a pretrained network, then cluster the points and fit 3-D bounding boxes to each cluster. Finally, you generate MEX code for the network.

Lidar Point Cloud Semantic Segmentation Using PointSeg Deep Learning Network
Train a PointSeg semantic segmentation network on 3-D organized lidar point cloud data.

Lidar Point Cloud Semantic Segmentation Using SqueezeSegV2 Deep Learning Network
Train a SqueezeSegV2 semantic segmentation network on 3-D organized lidar point cloud data.

Code Generation for Lidar Point Cloud Segmentation Network
Generate CUDA® MEX code for a deep learning network for lidar semantic segmentation. This example uses a pretrained SqueezeSegV2 [1] network that can segment organized lidar point clouds belonging to three classes (background, car, and truck). For information on the training procedure for the network, see Lidar Point Cloud Semantic Segmentation Using SqueezeSegV2 Deep Learning Network (Lidar Toolbox). The generated MEX code takes a point cloud as input and performs prediction on the point cloud by using the DAGNetwork object for the SqueezeSegV2 network.

Aerial Lidar Semantic Segmentation Using PointNet++ Deep Learning
Train a PointNet++ deep learning network to perform semantic segmentation on aerial lidar data.

Code Generation for Aerial Lidar Semantic Segmentation Using PointNet++ Deep Learning
Generate CUDA® MEX code for a PointNet++ network for lidar semantic segmentation.

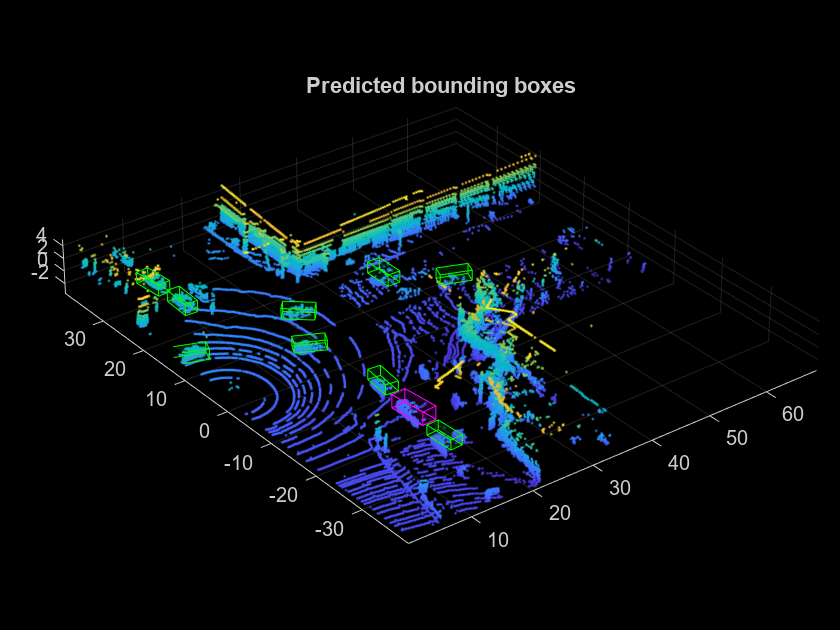
Lidar 3-D Object Detection Using PointPillars Deep Learning
Detect objects in lidar using PointPillars deep learning network. In this example, you
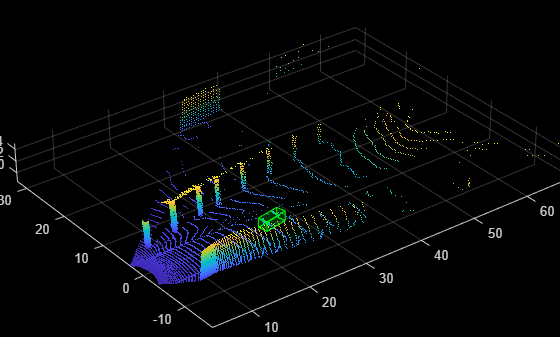
Code Generation for Lidar Object Detection Using PointPillars Deep Learning
Generate CUDA® MEX for a PointPillars object detector. For more information, see Lidar 3-D Object Detection Using PointPillars Deep Learning (Lidar Toolbox) example from the Lidar Toolbox™.
Data Augmentations for Lidar Object Detection Using Deep Learning
Perform typical data augmentation techniques for 3-D object detection workflows with lidar data.

Automate Ground Truth Labeling for Vehicle Detection Using PointPillars
Automate vehicle detections in a point cloud using a pretrained pointPillarsObjectDetector (Lidar Toolbox) in the Lidar Labeler (Lidar Toolbox). The example uses the AutomationAlgorithm interface in the Lidar Labeler app to automate labeling.