Polstellen und Nullstellen
Dieses Beispiel zeigt, wie Sie die Pol- und Nullstellen dynamischer Systeme sowohl grafisch mit pzplot als auch numerisch mit pole und zero untersuchen können.
Die Untersuchung der Pol- und Nullstellen kann für Aufgaben wie die Stabilitätsanalyse oder die Identifizierung von sich beinahe aufhebenden Pol-Nullstellen-Paaren zur Vereinfachung des Modells nützlich sein. Dieses Beispiel stellt einen Vergleich zwischen zwei Systemen mit geschlossenem Regelkreis an, die dieselbe Regelstrecke und unterschiedliche Regler haben.
Erstellen Sie dynamische Systemmodelle, die die beiden Systeme mit geschlossenem Regelkreis darstellen.
G = zpk([],[-5 -5 -10],100); C1 = pid(2.9,7.1); CL1 = feedback(G*C1,1); C2 = pid(29,7.1); CL2 = feedback(G*C2,1);
Der Regler C2 hat eine viel höhere proportionale Verstärkung. Ansonsten sind die beiden Systeme mit geschlossenem Regelkreis CL1 und CL2 identisch.
Untersuchen Sie grafisch die Pol- und Nullstellen von CL1 und CL2.
pzplot(CL1,CL2) grid
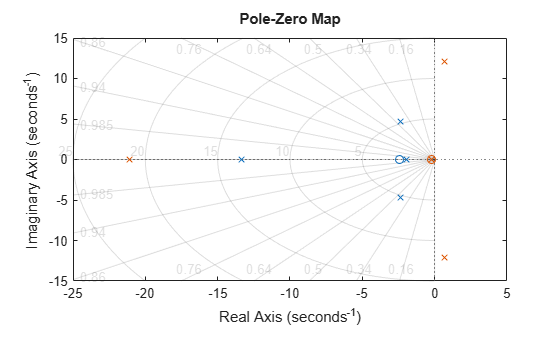
pzplot stellt die Pol- und Nullstellen in der komplexen Ebene als x und o-Markierungen dar. Wenn Sie mehrere Modelle bereitstellen, stellt pzplot die Pol- und Nullstellen jedes Modells in einer anderen Farbe dar. Hier sind die Pol- und Nullstellen von CL1 blau und die von CL2 grün.
Das Diagramm zeigt, dass alle Polstellen von CL1 in der linken Halbebene liegen und CL1 daher stabil ist. Anhand der radialen Gittermarkierungen im Diagramm können Sie ablesen, dass die Dämpfung der oszillierenden (komplexen) Polstellen ungefähr 0,45 beträgt. Das Diagramm zeigt auch, dass CL2 in der rechten Halbebene Polstellen enthält und daher instabil ist.
Berechnen Sie die numerischen Werte für die Pol- und Nullstellen von CL2.
z = zero(CL2); p = pole(CL2);
zero und pole liefern Spaltenvektoren, die die Null- und Polstellen des Systems enthalten.