invertedImageIndex
Search index that maps visual words to images
Description
An invertedImageIndex object is a search index that stores a
visual word-to-image mapping. You can use this object with the retrieveImages function to search for an image.
Creation
Syntax
Description
imageIndex = invertedImageIndex(bag)bag. The bag argument
sets the BagOfFeatures
property.
imageIndex = invertedImageIndex(bag,'SaveFeatureLocations',tf)imageIndex. To save image feature locations in the
imageIndex object, specify the logical value tf
as true. You can use location data to verify the spatial or geometric
image search results. If you do not require feature locations, you can reduce memory
consumption by specifying tf as false.
Properties
Object Functions
addImages | Add new images to image index |
removeImages | Remove images from image index |
addImageFeatures | Add features of image to image index |
Examples
Define a set of images to search.
imageFiles = ... {'elephant.jpg', 'cameraman.tif', ... 'peppers.png', 'saturn.png', ... 'pears.png', 'stapleRemover.jpg', ... 'football.jpg', 'mandi.tif', ... 'kids.tif', 'liftingbody.png', ... 'office_5.jpg', 'gantrycrane.png', ... 'moon.tif', 'circuit.tif', ... 'tape.png', 'coins.png'}; imds = imageDatastore(imageFiles);
Learn the visual vocabulary of the image view set.
numLevels = 1; branchingFactor = 1000; bag = bagOfFeatures(imds,'PointSelection','Detector', ... 'TreeProperties',[numLevels,branchingFactor]);
Creating Bag-Of-Features. ------------------------- * Selecting feature point locations using the Detector method. * Extracting SURF features from the selected feature point locations. ** detectSURFFeatures is used to detect key points for feature extraction. * Extracting features from 16 images...done. Extracted 3680 features. * Keeping 80 percent of the strongest features from each category. * Balancing the number of features across all image categories to improve clustering. ** Image category 1 has the least number of strongest features: 2944. ** Using the strongest 2944 features from each of the other image categories. * Creating a 1000 word visual vocabulary. * Number of levels: 1 * Branching factor: 1000 * Number of clustering steps: 1 * [Step 1/1] Clustering vocabulary level 1. * Number of features : 2944 * Number of clusters : 1000 * Initializing cluster centers...100.00%. * Clustering...completed 6/100 iterations (~0.04 seconds/iteration)...converged in 6 iterations. * Finished creating Bag-Of-Features
Create an image search index and add the image view set images.
imageIndex = invertedImageIndex(bag); addImages(imageIndex,imds);
Encoding images using Bag-Of-Features. -------------------------------------- * Encoding 16 images...done.
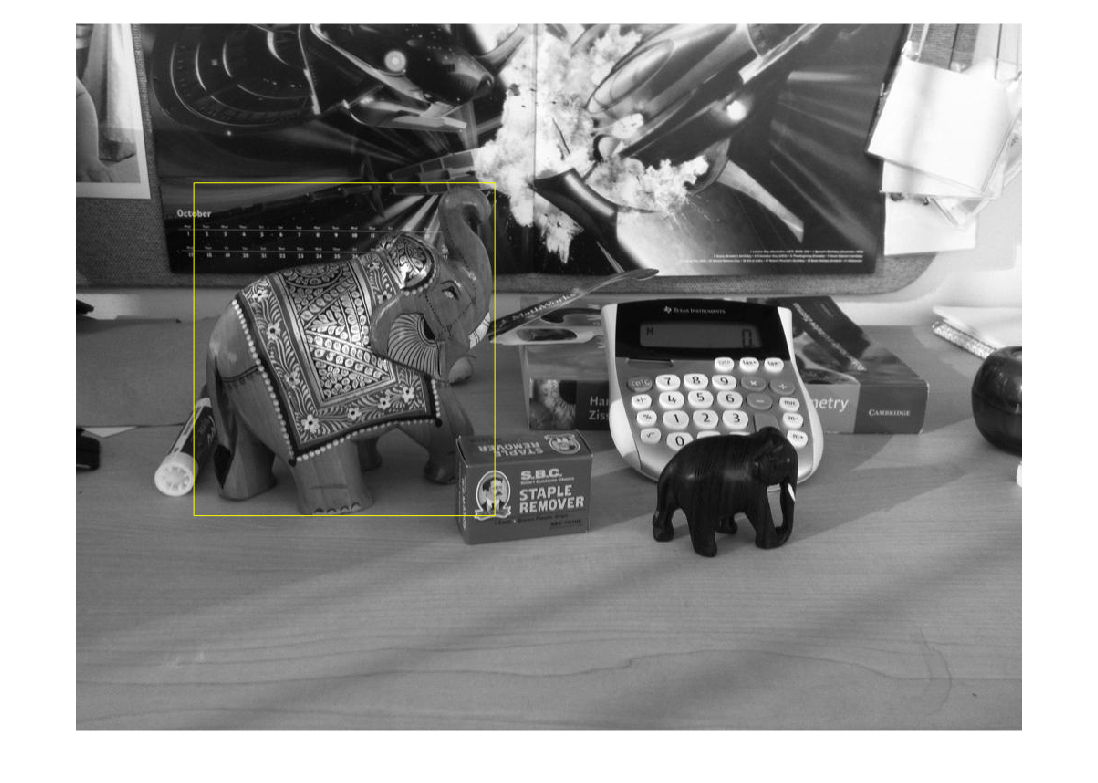
Specify a query image and an ROI in which to search for the target object, an elephant. You can also use the imrect function to select an ROI interactively. For example, queryROI = getPosition(imrect).
queryImage = imread('clutteredDesk.jpg'); queryROI = [130 175 330 365]; figure imshow(queryImage) rectangle('Position',queryROI,'EdgeColor','yellow')
Find images that contain the object.
imageIDs = retrieveImages(queryImage,imageIndex,'ROI',queryROI)imageIDs = 15×1 uint32 column vector
1
11
2
6
12
3
8
16
14
5
7
10
13
15
9
bestMatch = imageIDs(1);
figure
imshow(imageIndex.ImageLocation{bestMatch})
References
[1] Sivic, J. and A. Zisserman. Video Google: A text retrieval approach to object matching in videos. ICCV (2003) pg 1470-1477.
[2] Philbin, J., O. Chum, M. Isard, J. Sivic, and A. Zisserman. Object retrieval with large vocabularies and fast spatial matching. CVPR (2007).
Extended Capabilities
Version History
Introduced in R2015a