assignDetectionsToTracks
Assign detections to tracks for multiobject tracking
Syntax
Description
[
assigns detections to tracks in the context of multiple object tracking using
the James Munkres's variant of the Hungarian assignment algorithm. It also
determines which tracks are missing and which detections should begin new
tracks. It returns the indices of assigned and unassigned tracks, and unassigned
detections. The assignments,unassignedTracks,unassignedDetections]
= assignDetectionsToTracks(costMatrix,costOfNonAssignment)costMatrix must be an
M-by-N matrix. In this matrix,
M represents the number of tracks, and
N is the number of detections. Each value represents the
cost of assigning the Nth
detection to the Mth track. The
lower the cost, the more likely that a detection gets assigned to a track. The
costOfNonAssignment scalar input represents the cost of
a track or a detection remaining unassigned.
[ specifies
the cost of unassigned tracks and detections separately. The assignments,unassignedTracks,unassignedDetections]
= assignDetectionsToTracks(costMatrix, unassignedTrackCost,unassignedDetectionCost)unassignedTrackCost must
be a scalar value, or an M-element vector, where M represents
the number of tracks. For the M-element vector,
each element represents the cost of not assigning any detection to
that track. The unassignedDetectionCost must
be a scalar value or an N-element vector, where N represents
the number of detections.
Examples
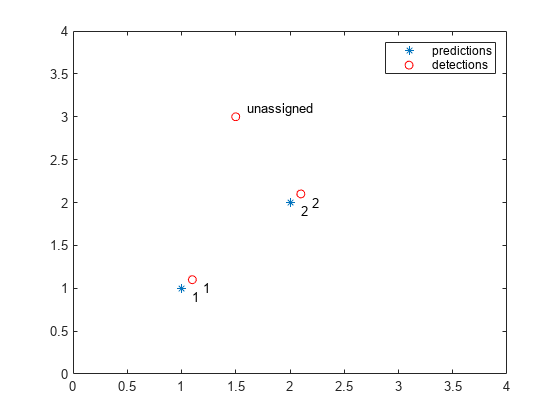
This example shows you how to assign a detection to a track for a single video frame.
Set the predicted locations of objects in the current frame. Obtain predictions using the Kalman filter System object.
predictions = [1,1;2,2];
Set the locations of the objects detected in the current frame. For this example, there are 2 tracks and 3 new detections. Thus, at least one of the detections is unmatched, which can indicate a new track.
detections = [1.1,1.1;2.1,2.1;1.5,3];
Preallocate a cost matrix.
cost = zeros(size(predictions,1),size(detections,1));
Compute the cost of each prediction matching a detection. The cost here, is defined as the Euclidean distance between the prediction and the detection.
for i = 1:size(predictions, 1) diff = detections - repmat(predictions(i,:),[size(detections,1),1]); cost(i, :) = sqrt(sum(diff .^ 2,2)); end
Associate detections with predictions. Detection 1 should match to track 1, and detection 2 should match to track 2. Detection 3 should be unmatched.
[assignment,unassignedTracks,unassignedDetections] = ... assignDetectionsToTracks(cost,0.2); figure; plot(predictions(:,1),predictions(:,2),'*',detections(:,1),... detections(:,2),'ro'); hold on; legend('predictions','detections'); for i = 1:size(assignment,1) text(predictions(assignment(i, 1),1)+0.1,... predictions(assignment(i,1),2)-0.1,num2str(i)); text(detections(assignment(i, 2),1)+0.1,... detections(assignment(i,2),2)-0.1,num2str(i)); end for i = 1:length(unassignedDetections) text(detections(unassignedDetections(i),1)+0.1,... detections(unassignedDetections(i),2)+0.1,'unassigned'); end xlim([0,4]); ylim([0,4]);
Input Arguments
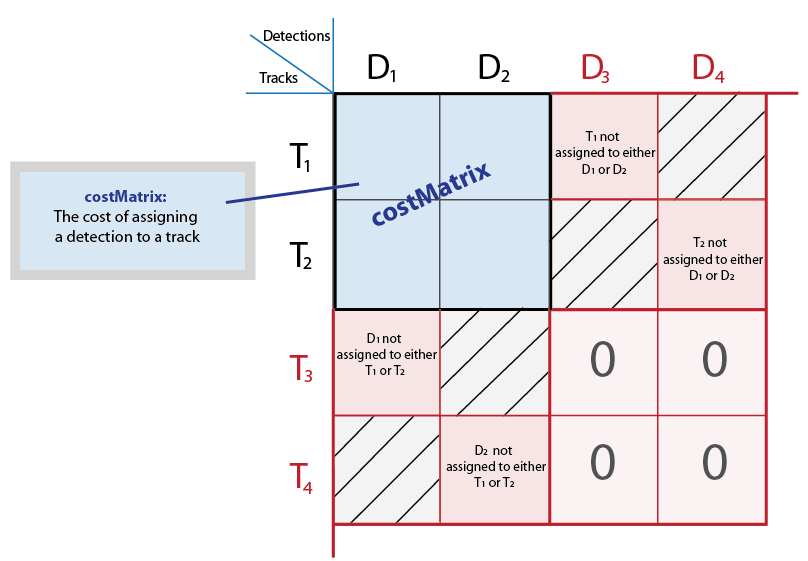
Cost of assigning a detection to a track, specified as an
M-by-N matrix, where
M represents the number of tracks, and
N is the number of detections. The cost matrix value
must be real, nonsparse, and numeric. The lower the cost, the more likely
that a detection gets assigned to a track. Each value represents the cost of
assigning the Nth detection to
the Mth track. If there is no
likelihood of an assignment between a detection and a track, the
costMatrix input is set to Inf.
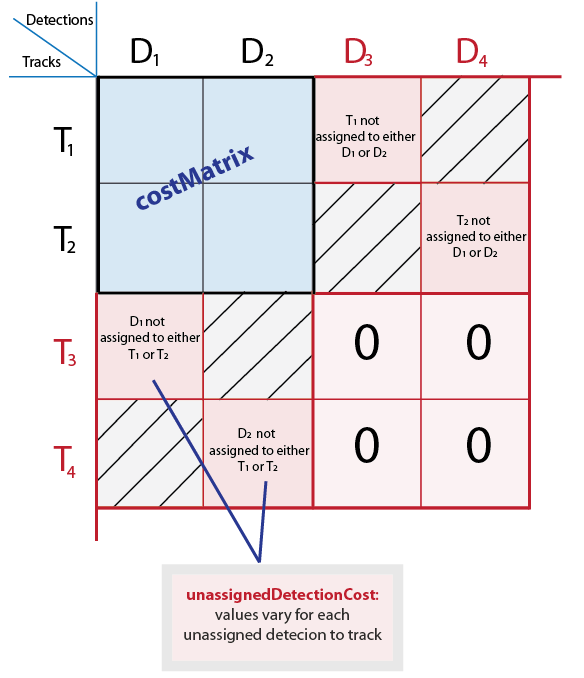
Internally, this function pads the cost matrix with dummy rows and columns
to account for the possibility of unassigned tracks and detections. The
padded rows represent detections not assigned to any tracks. The padded
columns represent tracks not associated with any detections. The function
applies the Hungarian assignment algorithm to the padded matrix.
Data Types: int8 | uint8 | int16 | uint16 | int32 | uint32 | single | double
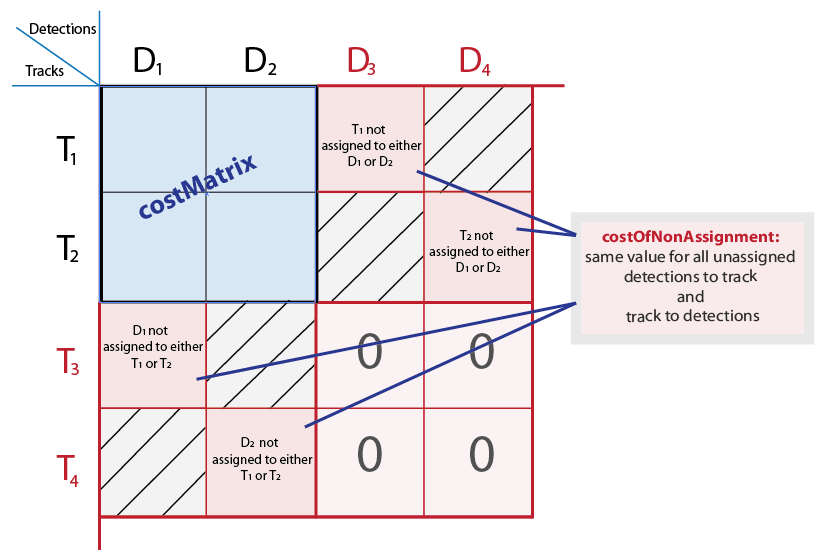
Cost of not assigning detection to any track or track to detection.
You can specify this value as a scalar value representing the cost
of a track or a detection remaining unassigned. An unassigned detection
may become the start of a new track. If a track is unassigned, the
object does not appear. The higher the costOfNonAssignment value,
the higher the likelihood that every track will be assigned a detection.
Internally, this function pads the cost matrix with dummy rows
and columns to account for the possibility of unassigned tracks and
detections. The padded rows represent detections not assigned to any
tracks. The padded columns represent tracks not associated with any
detections. To apply the same value to all elements in both the rows
and columns, use the syntax with the costOfNonAssignment input.
To vary the values for different detections or tracks, use the syntax
with the unassignedTrackCost and unassignedDetectionCost inputs.
Data Types: int8 | uint8 | int16 | uint16 | int32 | uint32 | single | double
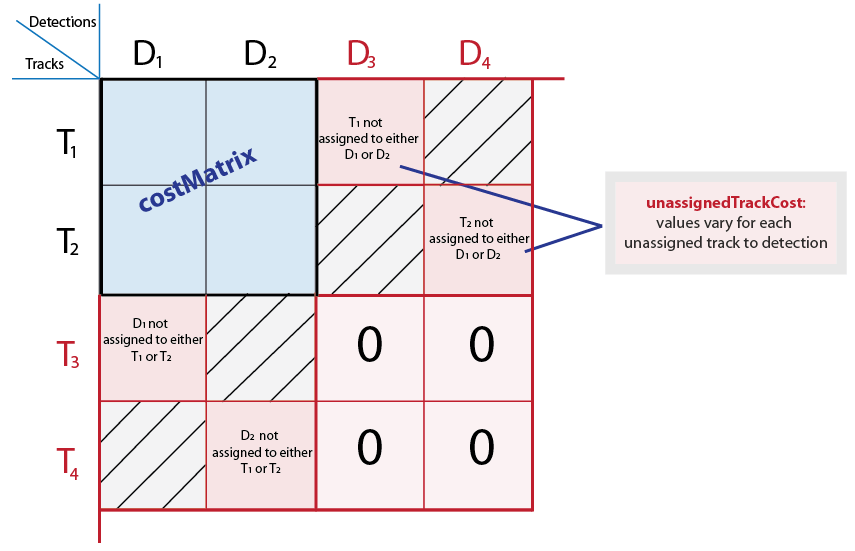
Cost or likelihood of an unassigned track. You can specify this value as a scalar value, or an M-element vector, where M represents the number of tracks. For the M-element vector, each element represents the cost of not assigning any detection to that track. A scalar input represents the same cost of being unassigned for all tracks. The cost may vary depending on what you know about each track and the scene. For example, if an object is about to leave the field of view, the cost of the corresponding track being unassigned should be low.
Internally, this function pads the cost matrix with dummy rows
and columns to account for the possibility of unassigned tracks and
detections. The padded rows represent detections not assigned to any
tracks. The padded columns represent tracks not associated with any
detections. To vary the values for different detections or tracks,
use the syntax with the unassignedTrackCost and unassignedDetectionCost inputs.
To apply the same value to all elements in both the rows and columns,
use the syntax with the costOfNonAssignment input.
Data Types: int8 | uint8 | int16 | uint16 | int32 | uint32 | single | double
Cost of unassigned detection, specified as a scalar value or an N-element vector, where N represents the number of detections. For the N- element vector, each element represents the cost of starting a new track for that detection. A scalar input represents the same cost of being unassigned for all tracks. The cost may vary depending on what you know about each detection and the scene. For example, if a detection appears close to the edge of the image, it is more likely to be a new object.
Internally, this function pads the cost matrix with dummy rows
and columns to account for the possibility of unassigned tracks and
detections. The padded rows represent detections not assigned to any
tracks. The padded columns represent tracks not associated with any
detections. To vary the values for different detections or tracks,
use the syntax with the unassignedTrackCost and unassignedDetectionCost inputs.
To apply the same value to all elements in both the rows and columns,
use the syntax with the costOfNonAssignment input.
Data Types: int8 | uint8 | int16 | uint16 | int32 | uint32 | single | double
Output Arguments
References
[1] Miller, Matt L., Harold S. Stone, and Ingemar J. Cox, “Optimizing Murty's Ranked Assignment Method,” IEEE Transactions on Aerospace and Electronic Systems, 33(3), 1997.
[2] Munkres, James, “Algorithms for Assignment and Transportation Problems,” Journal of the Society for Industrial and Applied Mathematics, Volume 5, Number 1, March, 1957.
Extended Capabilities
Version History
Introduced in R2012b