Winding
Electromagnetic converter with ohmic and magnetic flux losses

Libraries:
Simscape /
Electrical /
Passive
Description
The Winding block represents an electromagnetic converter with winding resistance and leakage reluctance. You can use this block as a base component for building custom transformers. For an ideal electromagnetic converter, see the Electromagnetic Converter.
When you apply a positive current across the electrical ports of the block, a positive magnetomotive force (MMF) is induced across the magnetic terminals.
Where:
ℱ is the MMF across the magnetic terminals of the block
N is the number of winding turns
i is the current through the winding
When you apply a positive time-varying flux across the magnetic terminals of the block, a negative voltage is induced across the electrical terminals of the block.
Where:
φ is the flux through the magnetic terminals of the block
i is the current through the electrical terminals of the block
ℛl is the leakage reluctance
Rw is the winding resistance
ℱ is the magnetomotive force across the magnetic terminals of the block
v is the voltage drop across the electrical terminals of the block
This figure shows the equivalent circuit for the block.
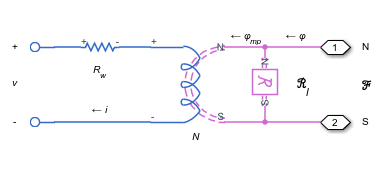
In the diagram, φmp corresponds to the main-path flux and φ to the total flux. You can set the initial condition for the total flux in the block's Variables tab.
Faults
To model a fault in the Winding block, in the Faults section, click Add fault next to the fault that you want to model. For more information about fault modeling, see Fault Behavior Modeling and Fault Triggering.
Instantaneous changes in the winding parameters are unphysical. Therefore, when the Winding block enters the faulted state, short-circuit and open-circuit voltages transition to their faulted values over a period of time based on this formula:
CurrentValue =
FaultedValue –
(FaultedValue –
UnfaultedValue) · sech(∆t
/ τ)
where:
∆t is time since the onset of the fault condition.
τ is user-defined time constant associated with the fault transition.
For short-circuit faults, the conductance of the short-circuit path also changes
according to the sech(∆t / τ) function from a small value
(representing an open-circuit path) to a large value.
Faultable windings often require that you use the fixed-step local solver, especially if your model transitions to a faulted state that includes short circuits. For more information, see Making Optimal Solver Choices for Physical Simulation.
You specify how and when faults occur by using the Trigger type parameter.
If you set the Trigger type to Behavioral,
the Winding block triggers fault events when:
The current continuously exceeds the value of the Maximum permissible current parameter for a duration longer than the value of the Time to fail when exceeding current parameter.
The voltage exceeds the Maximum permissible voltage a certain number of times, specified by the Number of events to fail when exceeding voltage parameter value.
If you set the Trigger
type to Conditional, you can choose whether faults
in the Winding block are reversible (since R2025a). To model irreversible faults, click
Open fault properties to open the Property Inspector and select the
Trigger stays on once activated parameter. The block enters the faulted
state when the trigger condition becomes true for the first time and remains in the faulted
state for the rest of the simulation. To model reversible faults, clear the Trigger
stays on once activated parameter. The block enters the faulted state when the
trigger condition is true and enters the unfaulted state when the trigger condition is
false.
For more information about adding faults to blocks and specifying fault triggers, see Introduction to Simscape Faults.
Variables
To set the priority and initial target values for the block variables before simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Use nominal values to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources. One of these sources is the Nominal Values section in the block dialog box or Property Inspector. For more information, see System Scaling by Nominal Values.
Examples

Three-Phase Custom Zigzag Transformer
Two different ways to create a custom transformer component. The first uses built-in library blocks to lay out the magnetic circuit as a masked Simulink® subsystem. The second builds a custom Simscape™ component using the Simscape language.
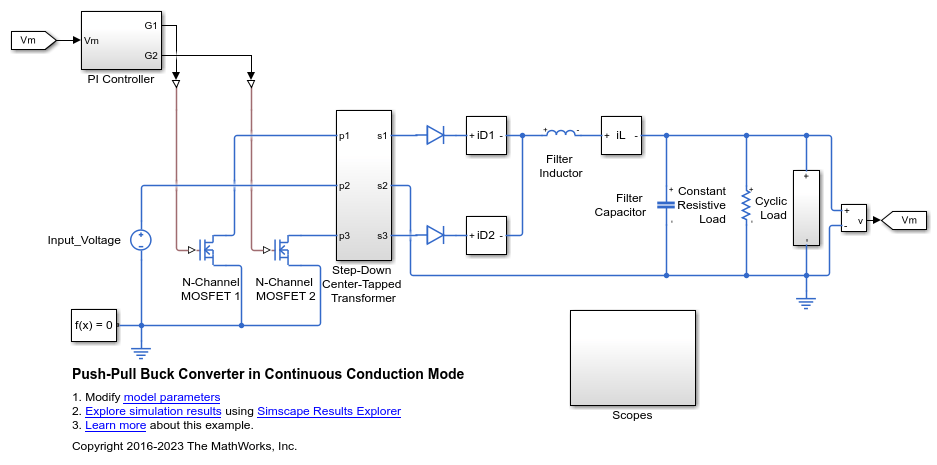
Push-Pull Buck Converter in Continuous Conduction Mode
Control the output voltage of a push-pull buck converter. The current flowing through the inductor is never zero. The DC-DC converter therefore operates in continuous conduction mode (CCM). To convert and maintain the nominal output voltage, the PI Controller subsystem uses a simple integral control. During startup, the reference voltage ramps up to the desired output voltage.
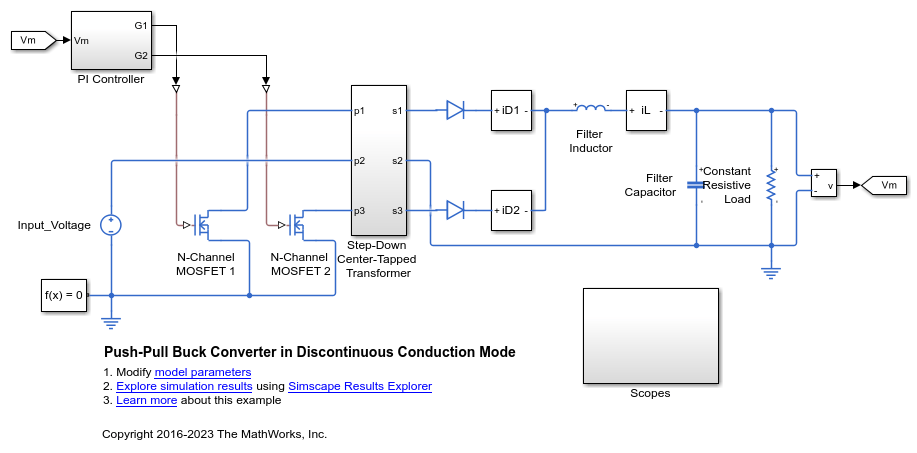
Push-Pull Buck Converter in Discontinuous Conduction Mode
Control the output voltage of a push-pull buck converter. The current flowing through the inductor reaches zero during the switch off cycle of the MOSFETs and therefore the DC-DC converter operates in Discontinuous Conduction Mode (DCM). This mode of conduction is mostly used for low-power applications. To convert and maintain the input DC voltage as a nominal output voltage, the PI Controller subsystem uses a simple integral control. During startup, the reference voltage is ramped up to the desired output voltage.