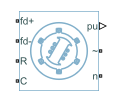
Synchronous Machine Salient Pole
Salient-pole synchronous machine with fundamental or standard parameterization
Libraries:
Simscape /
Electrical /
Electromechanical /
Synchronous
Description
The Synchronous Machine Salient Pole block models a salient-pole synchronous machine using fundamental or standard parameters.
Synchronous Machine Initialization Using Load-Flow Target Values
If the block is in a network that is compatible with the frequency-time simulation mode, you can perform a load-flow analysis on the network. A load-flow analysis provides steady-state values that you can use to initialize the machine.
For more information, see Perform a Load-Flow Analysis Using Simscape Electrical and Frequency and Time Simulation Mode. For an example that shows how to initialize a synchronous machine using data from a load-flow analysis, see Synchronous Machine Initialization with Loadflow.
Equations
The synchronous machine equations are expressed with respect to a rotating reference frame, defined by
where:
θe is the electrical angle.
N is the number of pole pairs.
θr is the rotor angle.
The Park transformation maps the synchronous machine equations to the rotating reference frame with respect to the electrical angle. The Park transformation is defined by
The Park transformation is used to define the per-unit synchronous machine equations. The stator voltage equations are defined by
and
where:
ed, eq, and e0 are the d-axis, q-axis, and zero-sequence stator voltages, defined by
va, vb, and vc are the stator voltages measured from port ~ to neutral port n.
ωbase is the per-unit base electrical speed.
ψd, ψq, and ψ0 are the d-axis, q-axis, and zero-sequence stator flux linkages.
ωr is the per-unit rotor rotational speed.
Ra is the stator resistance.
id, iq, and i0 are the d-axis, q-axis, and zero-sequence stator currents, defined by
ia, ib, and ic are the stator currents flowing from port ~ to port n.
The rotor voltage equations are defined by
and
where:
efd is the field voltage.
e1d, and e1q are the voltages across the d-axis damper winding 1 and q-axis damper winding 1. They are equal to 0.
ψfd, ψ1d, and ψ1q are the magnetic fluxes linking the field circuit, d-axis damper winding 1, and q-axis damper winding 1.
Rfd, R1d, and R1q are the resistances of rotor field circuit, d-axis damper winding 1, and q-axis damper winding 1.
ifd, i1d, and i1q are the currents flowing in the field circuit, d-axis damper winding 1, and q-axis damper winding 1.
The saturation equations are defined by
(if saturation is disabled),
(if saturation is enabled),
and
where:
ψad is the d-axis air-gap or mutual flux linkage.
ψaq is the q-axis air-gap or mutual flux linkage.
ψat is the air-gap flux linkage.
Ks is the saturation factor.
Ladu is the unsaturated mutual inductance of the stator d-axis.
Lad is the mutual inductance of the stator d-axis.
The saturation factor function, f, is calculated from the per-unit open-circuit lookup table as:
and
where:
Vag is the per-unit air-gap voltage.
In per-unit,
and
can be rearranged to
The stator flux linkage equations are defined by
and
where:
Ll is the stator leakage inductance.
Lad and Laq are the mutual inductances of the stator d-axis and q-axis.
The rotor flux linkage equations are defined by
and
where:
Lffd is the self-inductance of the rotor field circuit.
L11d is the self-inductance of the d-axis damper winding 1.
L11q is the self-inductance of the q-axis damper winding 1.
Lf1d is the rotor field circuit and d-axis damper winding 1 mutual inductance.
The inductances are defined by these equations:
The inductance equations assume that per-unit mutual inductance L12q = Laq, that is, the stator and rotor currents in the q-axis all link a single mutual flux represented by Laq.
The rotor torque is defined by
Plotting and Display Options
You can perform these plotting and display actions by clicking the associated button next to these parameters in the Utilities section:
Base values — Display the machine per-unit base values in the MATLAB® Command Window.
Associated base values — Display associated per-unit base values in the MATLAB Command Window.
Associated initial conditions — Display associated initial conditions in the MATLAB Command Window.
Open-circuit saturation (pu) — Plot air-gap voltage, Vag, versus field current, ifd, both measured in per-unit, in a MATLAB figure window. The plot contains three traces:
Unsaturated — Stator d-axis mutual inductance (unsaturated), Ladu you specify
Saturated — Per-unit open-circuit lookup table (Vag versus ifd) you specify
Derived — Open-circuit lookup table (per-unit) derived from the Per-unit open-circuit lookup table (Vag versus ifd) you specify. This data is used to calculate the saturation factor, Ks, versus magnetic flux linkage, ψat, characteristic.
Saturation factor (pu) — Plot saturation factor, Ks, versus magnetic flux linkage, ψat, both measured in per-unit, in a MATLAB figure window using the machine parameters. This parameter is derived from other parameters that you specify:
Stator d-axis mutual inductance (unsaturated), Ladu
Per-unit field current saturation data, ifd
Per-unit air-gap voltage saturation data, Vag
Power capability curves — Plot active power P versus reactive power Q, both measured in per-unit, in a MATLAB figure window. The plot might contain multiple traces. Each trace corresponds to a maximum field circuit voltage measured in per-unit (non-reciprocal per-unit system). The plot shows the maximum reactive power that the generator produces when operating with a lagging power factor and the minimum reactive power that the generator absorbs when operating with a leading power factor. (since R2023b)
Model Thermal Effects
You can expose thermal ports to model the effects of generated heat and machine temperature. To expose the thermal ports, set the Modeling option parameter to either:
No thermal port— The block does not contain thermal ports.Show thermal port— The block contains multiple thermal conserving ports.
For more information about using thermal ports in actuator blocks, see Simulating Thermal Effects in Rotational and Translational Actuators.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
For this block, the Initial Targets settings are visible only if, in
the Initial Conditions section, you set the Initialization
option parameter to Set targets for rotor angle and Park's
transform variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see System Scaling by Nominal Values.
Examples

Synchronous Machine Initialization with Loadflow
Initialize synchronous machine as part of a load flow analysis. When initializing a synchronous machine there are two degrees of freedom which can be set by any two of rotor angle, active power, reactive power and terminal voltage. The pair of variables that are constrained is set by the source type drop-down menu, this having options of Swing bus, PV bus and PQ bus. Here the machine is configured for a swing bus with a 1.02 per-unit voltage and zero degrees phase.

SM Torque Control
Control the torque in a synchronous machine (SM) based electrical-traction drive. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and a controlled four quadrant chopper for the rotor winding. An ideal angular velocity source provides the load. The Control subsystem uses an open-loop approach to control the torque and a closed-loop approach to control the current. At each sample instant, the torque request is converted to relevant current references. The current control is PI-based. The simulation uses several torque steps in both motor and generator modes. The task scheduling is implemented as a Stateflow® state machine. The Visualization subsystem contains scopes that allow you to see the simulation results.

SM Velocity Control
Control the rotor angular velocity in a synchronous machine (SM) based electrical-traction drive. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and a controlled four quadrant chopper for the rotor winding. An ideal torque source provides the load. The Control subsystem includes a multi-rate PI-based cascade control structure which has an outer angular-velocity-control loop and three inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The Visualization subsystem contains scopes that allow you to see the simulation results.

Marine Full Electric Propulsion Power System
A representative marine half-ship electrical power system with base load, hotel load, bow thrusters and electric propulsion.
Ports
Output
Conserving
Parameters
References
[1] Kundur, P. Power System Stability and Control. New York, NY: McGraw Hill, 1993.
[2] Lyshevski, S. E. Electromechanical Systems, Electric Machines and Applied Mechatronics. Boca Raton, FL: CRC Press, 1999.