Iterative Learning Control
Libraries:
Simulink Control Design /
Adaptive Control
Description
Iterative learning control (ILC) is an improvement in run-to-run control. This method uses frequent measurements in the form of the error trajectory from the previous batch run to update the control signal for the subsequent batch run. ILC improves the performance of systems that execute repeated operations, starting at the same initial operating condition. You can use ILC in many practical industrial systems in manufacturing, robotics, and chemical processing, where mass production on an assembly line requires repetition.
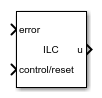
The Iterative Learning Control block provides the following configurations:
Model-free ILC — This method does not require prior knowledge of the system dynamics and uses proportional-derivative (PD) error feedback to update the control history. The model-free ILC update law is:
Here, γp is the proportional gain, γd is the derivative gain, and Q(q) is the first-order low-pass filter. Depending on the choice of PD gain, you can choose to implement P-type, D-type, or PD-type ILC. This method is applicable only to SISO systems.
Model-based ILC — This method is a more general form of ILC and is applicable to continuous-time and discrete-time LTI state-space systems of the following form:
Additionally, this method allows you to use either of the following two update methods:
Gradient-based ILC —
Inverse-model based ILC —
For more information about ILC, see Iterative Learning Control.
Examples
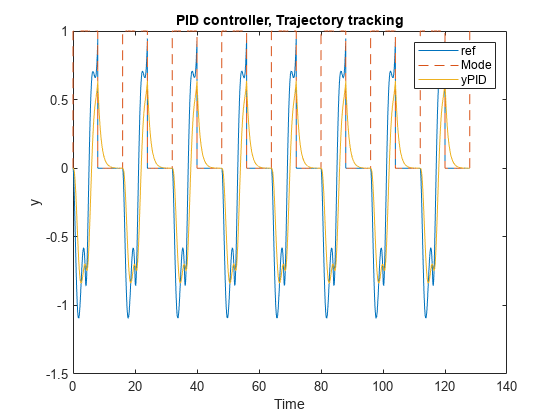
Iterative Learning Control of a Single-Input Single-Output System
Implement an ILC controller to improve closed-loop trajectory tracking performance.
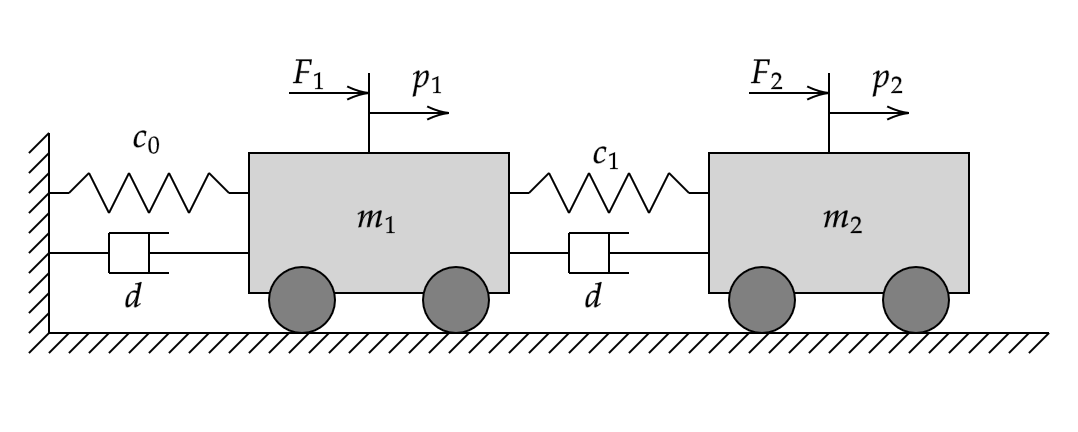
Model Based Iterative Learning Control of Multi-Input Multi-Output System
Implement model-based ILC controller to improve closed-loop trajectory tracking performance of a MIMO system.
Ports
Input
Output
Parameters
To edit block parameters interactively, use the Property Inspector. From the Simulink® Toolstrip, on the Simulation tab, in the Prepare gallery, select Property Inspector.
Sample time of the ILC controller, specified as a positive scalar.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | Ts |
| Values: | "0.01" (default) | positive scalar in quotes |
Example: set_param(gcb,"Ts","0.1")
Duration of one ILC iteration, specified as a positive scalar. This parameter determines how many control actions the block provides in the control mode.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | Tspan |
| Values: | "1" (default) | positive scalar in quotes |
Example: set_param(gcb,"Tspan","10")
Specify the output data type.
The Data Type Assistant helps you set
data attributes. To use the Data Type
Assistant, click ![]() .
.
You can specify the following data types.
Built in—singleordoubledata types.Expression— Use a MATLAB expression that specifies the type.
For more information, see Specify Data Types Using Data Type Assistant.
ILC algorithm, specified as Model free ILC or Model based ILC.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | Algorithm |
| Values: | "Model free ILC" (default) | "Model based ILC" |
Example: set_param(gcb,"Algorithm","Model based
ILC")
Proportional gain (γp) in the model-free ILC update law, specified as a nonnegative scalar. The model-free ILC update law is defined as follows:
Dependencies
To enable this parameter, set ILC Algorithm to Model free ILC.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | gamma_p |
| Values: | "1" (default) | nonnegative scalar in quotes |
Example: set_param(gcb,"gamma_p","5")
Derivative gain γd in the model-free ILC update law, specified as a nonnegative scalar. The model-free ILC update law is defined as follows:
Dependencies
To enable this parameter, set ILC Algorithm to Model free ILC.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | gamma_d |
| Values: | "0" (default) | nonnegative scalar in quotes |
Example: set_param(gcb,"gamma_d","1")
Time domain of the state-space model in model-based ILC, specified as Continuous time or Discrete time (Ts). The sample time of the model must be equal to the ILC sample time specified using the Sample time (Ts).
Dependencies
To enable this parameter, set ILC Algorithm to Model based ILC.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | ModelTimeDomain |
| Values: | "Continuous time" (default) | "Discrete time (Ts)" |
Example: set_param(gcb,"ModelTimeDomain","Discrete time
(Ts)")
Specify the matrices of the nominal or approximate state-space model for the model-based ILC algorithm. The block requires you to specify the plant dynamics in the following form:
Dependencies
To enable these parameters, set ILC Algorithm to Model based ILC.
Model-based ILC method, specified as Gradient based or Inverse-model based.
Dependencies
To enable this parameter, set ILC Algorithm to Model based ILC.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | ModelBasedILCType |
| Values: | "Gradient based" (default) | "Inverse-model based" |
Example: set_param(gcb,"ModelBasedILCType","Inverse-model
based")
Gradient-based ILC gain, specified as a positive scalar.
Dependencies
To enable this parameter, set ILC Algorithm to Model based ILC and ILC methods to Gradient based.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | gamma_grad |
| Values: | "1" (default) | positive scalar in quotes |
Example: set_param(gcb,"gamma_grad","2")
Inverse-model-based ILC gain, specified as a positive scalar less than 2.
Dependencies
To enable this parameter, set ILC Algorithm to Model based ILC and ILC methods to Inverse-model based.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | gamma_inverse |
| Values: | "1" (default) | positive scalar less than 2 in quotes |
Example: set_param(gcb,"gamma_inverse","1.5")
Select this parameter to apply a first-order low-pass filter to the ILC update law.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | LPFEnable |
| Values: | "off" (default) | "on" |
Example: set_param(gcb,"LPFEnable","on")
Time constant of the first-order low-pass filter, specified as a positive scalar.
Dependencies
To enable this parameter, select Enable first-order low-pass filter.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | tau |
| Values: | "1" (default) | positive scalar in quotes |
Example: set_param(gcb,"tau","10")
Extended Capabilities
Version History
Introduced in R2024b