read
Description
[
returns a point cloud, distances from the sensor to object points, reflectivity of surface
materials, and the semantic identifiers of the objects in a scene. You can set the field of
view and angular resolution in the pointCloud,range,reflectivity,semantic] = read(lidar)sim3d.sensors.Lidar
object specified by lidar.
Examples
Since R2025a
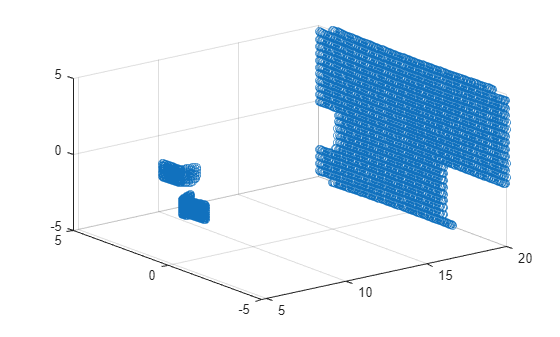
Create a lidar sensor in the 3D environment using the sim3d.sensors.Lidar object. You can extract the point cloud with the specified field of view and angular resolution and display it in MATLAB®. Use the read function to extract the point cloud data from the 3D environment. The point cloud is a collection of data points that represents objects in the 3D environment. You can use point cloud data to map a 3D environment.
Create a 3D environment and set up communication with the Unreal Engine® simulation environment using the output function OutputImpl and the update function UpdateImpl. The sim3d.World object can send and receive data about the 3D environment to and from the Unreal Engine at each simulation step using output and update functions, respectively. Before the Unreal Engine simulates, MATLAB® calls the output function and sends data to the Unreal Engine. Then, the Unreal Engine executes at each time step and sends data to MATLAB in the update function. You can use the update function to read this data or change values after each simulation step.
world = sim3d.World(Output=@OutputImpl,Update=@UpdateImpl);
Create a box actor Cube1 in the 3D environment using the sim3d.Actor object and add the box to the world.
cube1 = sim3d.Actor( ... ActorName="Cube1", ... Mobility='Movable'); createShape(cube1,"box"); cube1.Color = [1 0 0]; cube1.Translation = [5.30 1.10 -0.80]; add(world,cube1);
Create a box actor Cube2 in the 3D environment using the sim3d.Actor object and add the box to the world.
cube2 = sim3d.Actor( ... ActorName="Cube2", ... Mobility='Movable'); cube2.Translation = [8.00 -2.20 -0.60]; createShape(cube2,"box"); cube2.Color = [0 1 0]; add(world,cube2);
Create a plane actor Plane1 in the 3D environment using the sim3d.Actor object and add the plane to the world.
plane1 = sim3d.Actor( ... ActorName="Plane1", ... Mobility='Movable'); plane1.Translation = [20 0 0]; plane1.Rotation = [0 -pi/2 0]; plane1.Scale = [10 10 1]; createShape(plane1,"plane"); add(world,plane1);
Create a lidar object using the sim3d.sensors.Lidar object. Add the lidar to the world.
lidar = sim3d.sensors.Lidar(ActorName="Lidar");
add(world,lidar);Run the co-simulation.
sampletime = 1/60; stoptime = 10; run(world,sampletime,stoptime);
Output Function
The output function sends data about the actor to the Unreal Engine environment at each simulation step. For this example, the function rotates the Cube about its Z-axis by updating the Rotation property of the Cube at each simulation step.
function OutputImpl(world) world.Actors.Cube1.Rotation(3) = world.Actors.Cube1.Rotation(3) ... + 0.002; end
Update Function
The update function reads data from the Unreal Engine environment at each simulation step. For this example, the update function uses the read function of the sim3d.sensors.Lidar object to get the point cloud data from the Lidar in the Unreal Engine environment. Use the scatter3 function to visualize the point cloud data in MATLAB.
function UpdateImpl(world) [pc,~] = read(world.Actors.Lidar); [m,n,~] = size(pc); points = reshape(pc,m*n,3); scatter3(points(:,1), points(:,2), points(:,3)); end
Input Arguments
Output Arguments
References
[1] Phong, Bui Tuong. “Illumination for Computer Generated Pictures.” Communications of the ACM 18, no. 6 (June 1975): 311–17. https://doi.org/10.1145/360825.360839.
Version History
Introduced in R2024b
See Also
sim3d.sensors.Lidar | sim3d.World | sim3d.Actor | pointCloud (Computer Vision Toolbox) | pcplayer (Computer Vision Toolbox) | Simulation 3D Lidar