Modellieren eines Anti-Blockier-Bremssystems
Dieses Beispiel zeigt, wie Sie ein einfaches Anti-Blockier-Bremssystem (ABS) modellieren können. Das Modell simuliert das dynamische Verhalten eines Fahrzeugs bei starkem Bremsen. Das Modell stellt ein einzelnes Rad dar, das mehrfach nachgebildet werden kann, um ein Modell für ein mehrrädriges Fahrzeug zu erstellen.
Dieses Modell verwendet die Signalprotokollierungsfunktion in Simulink®. Das Modell protokolliert die Signale im MATLAB® Workspace, wo Sie sie anzeigen und analysieren können. Zeigen Sie den Code in der ModelingAnAntiLockBrakingSystemExample.m-Datei an, um zu sehen, wie die Software die Signale protokolliert.
Im Modell sldemo_absbrake wird die Radgeschwindigkeit in einem separaten Modell namens sldemo_wheelspeed_absbrake berechnet. Diese Komponente wird dann über einen Modellblock referenziert. Sowohl das Topmodell als auch das referenzierte Modell verwenden einen Solver mit variablen Schritten, daher verfolgt Simulink die Nulldurchgänge im referenzierten Modell.

Modell-Physik
Das Rad dreht sich mit einer anfänglichen Winkelgeschwindigkeit (Raddrehzahl), die der Fahrzeuggeschwindigkeit vor der Bremsung entspricht. Das Modell verwendet separate Integratoren, um die Raddrehzahl und die Fahrzeuggeschwindigkeit zu berechnen. Das Modell verwendet zwei Geschwindigkeiten zur Berechnung des Schlupfs, der durch Gleichung 1 bestimmt wird. Beachten Sie, dass die Fahrzeuggeschwindigkeit als Winkelgeschwindigkeit ausgedrückt wird.

Gleichung 1






Der Schlupf ist gleich null, wenn die Radgeschwindigkeit und die Fahrzeuggeschwindigkeit gleich sind, und der Schlupf ist gleich eins, wenn das Rad blockiert ist. Ein wünschenswerter Schlupfwert ist 0.2, was bedeutet, dass die Anzahl der Radumdrehungen gleich 0.8 mal der Anzahl der Umdrehungen unter ungebremsten Bedingungen bei gleicher Fahrzeuggeschwindigkeit ist. Bei diesem Wert ist die Haftung zwischen Reifen und Straße maximal und der Bremsweg mit der verfügbaren Reibung minimal.
Modell-Analyse
Der Reibungskoeffizient zwischen dem Reifen und der Straßenoberfläche, mu, ist eine empirische Funktion des Schlupfes, die als µ-Schlupf-Kurve bekannt ist. Die Software erstellt µ-Schlupf-Kurven, indem sie MATLAB-Variablen mithilfe einer Simulink-Lookup-Tabelle in das Blockdiagramm einfügt. Das Modell multipliziert den Reibungskoeffizienten mu mit dem Gewicht des Rades W, um die Reibungskraft Ff zu erhalten, die auf den Umfang des Reifens wirkt. Ff wird durch die Fahrzeugmasse dividiert, um die Fahrzeugverzögerung zu erhalten, die das Modell integriert, um die Fahrzeuggeschwindigkeit zu bestimmen.
Das Modell verwendet einen idealen Antiblockier-Bremsregler mit Zweipunktregelung, die auf der Abweichung zwischen Ist-Schlupf und Soll-Schlupf basiert. Der Soll-Schlupf wird auf den Wert des Schlupfes eingestellt, bei dem die µ-Schlupf-Kurve ihren Spitzenwert erreicht, da dies den optimalen Wert zur Minimierung des Bremsweges darstellt.
In einem realen Fahrzeug kann der Schlupf nicht direkt gemessen werden, daher ist dieser Regelungsalgorithmus in der Praxis nicht umsetzbar. In diesem Beispiel wird der Algorithmus verwendet, um den konzeptionellen Aufbau eines solchen Simulationsmodells zu veranschaulichen.
Doppelklicken Sie auf das Subsystem Wheel Speed, um es zu öffnen. Ausgehend vom Radschlupf, dem Soll-Radschlupf und dem Reifendrehmoment berechnet dieses Subsystem die Raddrehzahl.
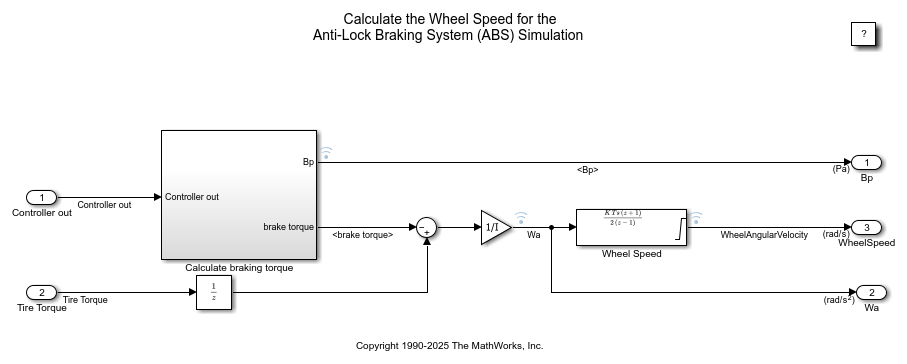
Um die Änderungsrate des Bremsdrucks zu steuern, subtrahiert das Modell den Ist-Schlupf vom Soll-Schlupf und speist dieses Signal in eine Zweipunktregelung (+1 oder -1, je nach Vorzeichen der Abweichung) ein. Diese Ein/Aus-Rate durchläuft eine Verzögerung erster Ordnung, die die Verzögerung aufgrund der Hydraulikleitungen des Bremssystems darstellt. Das Modell integriert dann die gefilterte Rate, um den tatsächlichen Bremsdruck zu ermitteln. Das resultierende Signal, multipliziert mit der Kolbenfläche und dem wirksamen Radius des Rads (Kf), ergibt das auf das Rad wirkende Bremsmoment.
Das Modell multipliziert die auf das Rad wirkende Reibungskraft mit dem Radius des Rads (Rr), um das auf das Rad wirkende Beschleunigungsmoment der Straßenoberfläche zu erhalten. Das Bremsmoment wird abgezogen, um das resultierende Drehmoment am Rad zu erhalten. Die Division des resultierenden Drehmoments durch die Rotationsträgheit des Rads I ergibt die Radbeschleunigung, die dann integriert wird, um die Radgeschwindigkeit zu erhalten. Damit Radgeschwindigkeit und Fahrzeuggeschwindigkeit positiv bleiben, verwendet das Modell begrenzte Integratoren.
Simulieren im ABS-Modus
Klicken Sie auf der Registerkarte Simulation auf Run (Ausführen), um die Simulation zu starten. Sie können die Simulation auch ausführen, indem Sie den Befehl sim('sldemo_absbrake') im MATLAB-Befehlsfenster eingeben. Während dieser Simulation ist das ABS eingeschaltet.
Das Modell protokolliert die relevanten Daten im MATLAB-Workspace in einer Struktur namens sldemo_absbrake_output. Protokollierte Signale sind mit einem blauen Indikator versehen. In diesem Fall werden yout und slp protokolliert.
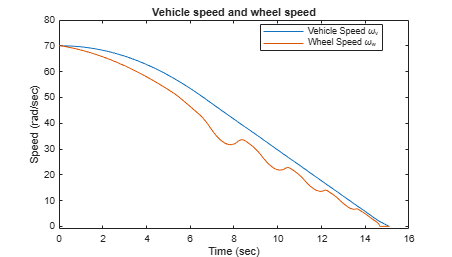
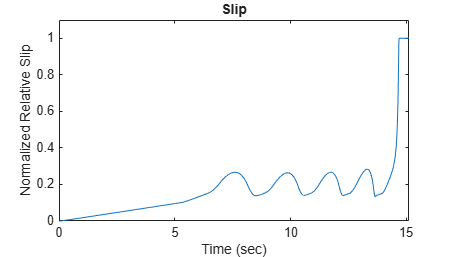
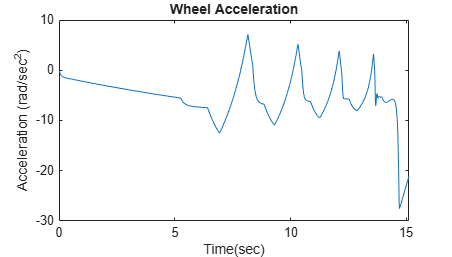
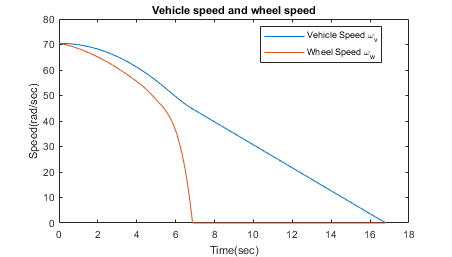
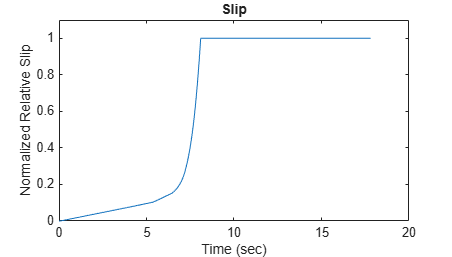
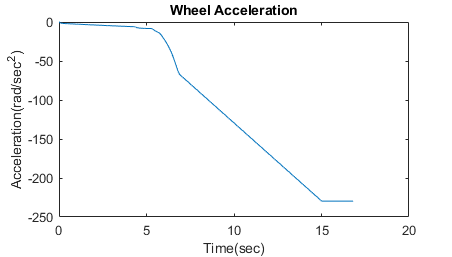
Diese Diagramme zeigen die ABS-Simulationsergebnisse für Standardparameter. Das erste Diagramm zeigt die Raddrehzahl und die entsprechende Winkelgeschwindigkeit des Fahrzeugs. Das zweite Diagramm zeigt, dass die Radgeschwindigkeit unter der Fahrzeuggeschwindigkeit bleibt, ohne zu blockieren, wobei die Fahrzeuggeschwindigkeit in weniger als 15 Sekunden auf null sinkt. Die Radbeschleunigung, das Radschlupfverhältnis und der Bremsdruck werden überwacht. Anhand des Schlupfverhältnisses wird festgestellt, ob das Rad blockiert ist. Die Bremszyklen werden durch Überwachung des Bremswegs und des Bremsdrucks beobachtet.
Simulieren ohne ABS
Um aussagekräftigere Ergebnisse zu erhalten, betrachten Sie das Fahrzeugverhalten ohne ABS. Setzen Sie im MATLAB-Befehlsfenster die Modellvariable auf ctrl = 0. Bei dieser Einstellung wird die Schlupf-Rückführung vom Regler getrennt, was zu einer maximalen Bremsung führt.
Führen Sie die Simulation erneut aus, um das Bremsen ohne ABS zu modellieren.
Bremsen mit ABS vs. Bremsen ohne ABS
Im Diagramm, das die Fahrzeug- und die Radgeschwindigkeit anzeigt, sehen Sie, dass das Rad nach etwa sieben Sekunden blockiert. Die Bremsen werden von diesem Zeitpunkt an in einem suboptimalen Teil der Schlupf-Kurve eingesetzt. Bei slip = 1 rutscht der Reifen so stark auf der Fahrbahn, dass die Reibungskraft abnimmt, wie im Schlupf-Diagramm ersichtlich ist.
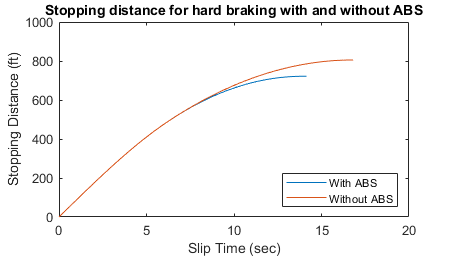
Dieses Diagramm zeigt die vom Fahrzeug zurückgelegte Strecke in beiden Fällen. Ohne ABS rutscht das Fahrzeug etwa 30 Meter weiter und benötigt etwa drei Sekunden länger, um zum Stillstand zu kommen.
Erweiterte Modellierung
Der Regler in diesem Beispiel ist idealisiert, aber Sie können an seiner Stelle jeden beliebigen Regelungsalgorithmus verwenden, um die Leistung Ihres Systems zu bewerten. Für Rapid Prototyping des vorgeschlagenen Algorithmus können Sie auch Simulink Coder™ verwenden.
Simulink Coder generiert und kompiliert C Code für die Regler-Hardware, um das Konzept in einem Fahrzeug zu testen. Dieser Prozess verkürzt die Zeit, die zum Testen neuer Ideen benötigt wird, erheblich, da er bereits in einer frühen Phase des Entwicklungszyklus tatsächliche Tests ermöglicht.
Für die Hardware-in-the-Loop-Simulation eines Bremssystems können Sie mit Simulink Coder Echtzeit-C Code generieren, um die Zweipunktregelung zu entfernen und die Bewegungsgleichungen auf Echtzeit-Hardware auszuführen, um die Rad- und Fahrzeugdynamik zu emulieren. Sie können dann einen realen ABS-Regler testen, indem Sie ihn mit der Echtzeit-Hardware verbinden, auf der der generierte Code ausgeführt wird. In diesem Szenario sendet das Echtzeitmodell die Radgeschwindigkeit an den Regler, und der Regler sendet die Bremswirkung ans Modell.