ordertrack
Track and extract order magnitudes from vibration signal
Syntax
Description
mag = ordertrack(x,fs,rpm,orderlist)mag, that contains time-dependent root-mean-square
(RMS) amplitude estimates of a specified set of orders, orderlist,
present in input signal x. x is
measured at a set rpm of rotational speeds expressed
in revolutions per minute. fs is the measurement
sample rate in Hz.
[___] = ordertrack(___,
specifies further options using Name,Value)Name,Value pairs. Some of
the options apply only to the Vold-Kalman tracking procedure.
ordertrack(___) with no output
arguments plots in the current figure the time-dependent orders and
RPM values.
Examples
Create a simulated signal sampled at 600 Hz for 5 seconds. The system that is being tested increases its rotational speed from 10 to 40 revolutions per second (or, equivalently, from 600 to 2400 revolutions per minute) during the observation period.
Generate the tachometer readings.
fs = 600; t1 = 5; t = 0:1/fs:t1; f0 = 10; f1 = 40; rpm = 60*linspace(f0,f1,length(t));
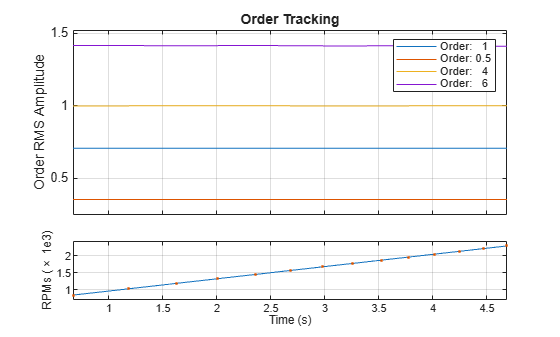
The signal consists of four harmonically related chirps with orders 1, 0.5, 4, and 6. The amplitudes of the chirps are 1, 1/2, √2, and 2, respectively. To generate the chirps, use the trapezoidal rule to express the phase as the integral of the rotational speed.
o1 = 1; o2 = 0.5; o3 = 4; o4 = 6; a1 = 1; a2 = 0.5; a3 = sqrt(2); a4 = 2; ph = 2*pi*cumtrapz(rpm/60)/fs; x = [a1 a2 a3 a4]*cos([o1 o2 o3 o4]'*ph);
Extract and visualize the magnitudes of the orders.
ordertrack(x,fs,rpm,[o1 o2 o3 o4])
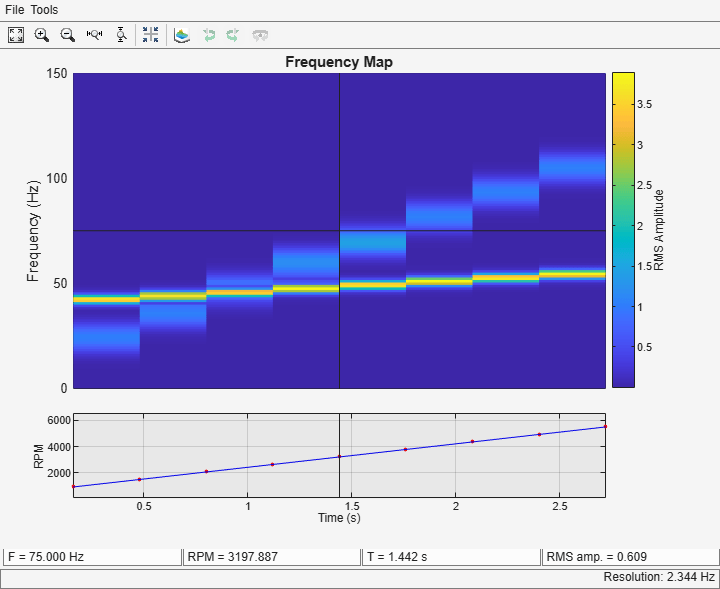
Create a simulated vibration signal consisting of two crossing orders corresponding to two different motors. The signal is sampled at 300 Hz for 3 seconds. The first motor increases its rotational speed from 10 to 100 revolutions per second (or, equivalently, from 600 to 6000 revolutions per minute) during the measurement. The second motor increases its rotational speed from 50 to 70 revolutions per second (or 3000 to 4200 revolutions per minute) during the same period.
fs = 300; nsamp = 3*fs; rpm1 = linspace(10,100,nsamp)'*60; rpm2 = linspace(50,70,nsamp)'*60;
The measured signal is of order 1.2 and amplitude 2√2 with respect to the first motor. With respect to the second motor, the signal is of order 0.8 and amplitude 4√2.
x = [2 4]*sqrt(2).*cos(2*pi*cumtrapz([1.2*rpm1 0.8*rpm2]/60)/fs);
Make the first motor excite a resonance at the middle of the frequency range.
rs = [1+1./(1+linspace(-10,10,nsamp).^4)'/2 ones(nsamp,1)]; x = sum(rs.*x,2);
Visualize the orders using rpmfreqmap.
rpmfreqmap(x,fs,rpm1)
Compute the order magnitudes for both motors as a function of RPM. Use the Vold-Kalman algorithm to decouple the crossing orders.
ordertrack(x,fs,[rpm1 rpm2],[1.2 0.8],[1 2],'Decouple',true)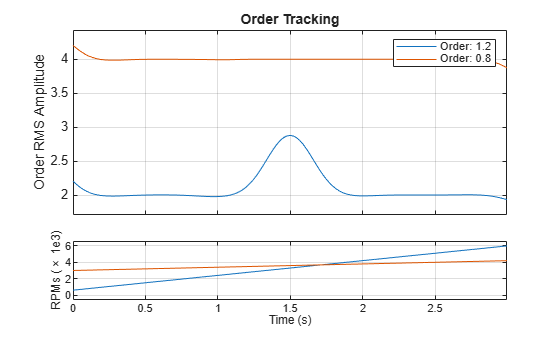
Analyze simulated data from an accelerometer placed in the cockpit of a helicopter.
Load the helicopter data. The vibrational measurements, vib, are sampled at a rate of 500 Hz for 10 seconds. Inspection of the data reveals that it has a linear trend. Remove the trend to prevent it from degrading the quality of the order estimation.
load("helidata.mat")
vib = detrend(vib);Compute the order-RPM map. Specify an order resolution of 0.005.
[map,order,rpm,time,res] = rpmordermap(vib,fs,rpm,0.005);
Compute and plot the average order spectrum of the signal. Find the three highest peaks of the spectrum.
[spectrum,specorder] = orderspectrum(map,order); [~,pkords] = findpeaks(spectrum,specorder,SortStr="descend",Npeaks=3); findpeaks(spectrum,specorder,SortStr="descend",Npeaks=3)
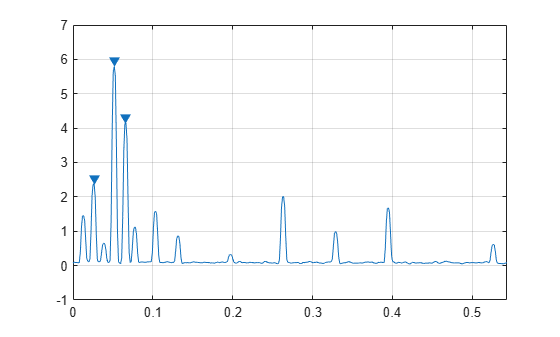
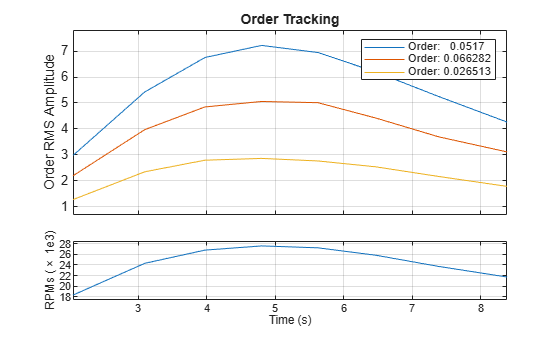
Track the amplitudes of the three highest peaks.
ordertrack(map,order,rpm,time,pkords)
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Brandt, Anders. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures. Chichester, UK: John Wiley & Sons, 2011.
[2] Feldbauer, Christian, and Robert Höldrich. "Realization of a Vold-Kalman Tracking Filter — A Least Squares Problem." Proceedings of the COST G-6 Conference on Digital Audio Effects (DAFX-00). Verona, Italy, December 7–9, 2000.
[3] Vold, Håvard, and Jan Leuridan. "High Resolution Order Tracking at Extreme Slew Rates Using Kalman Tracking Filters." Shock and Vibration. Vol. 2, 1995, pp. 507–515.
[4] Tůma, Jiří. “Algorithms for the Vold-Kalman Multiorder Tracking Filter.” Proceedings of the 14th International Carpathian Control Conference (ICCC), 2013, pp. 388–94. https://doi.org/10.1109/CarpathianCC.2013.6560575.
Extended Capabilities
Version History
Introduced in R2016b
See Also
orderspectrum | orderwaveform | rpmfreqmap | rpmordermap | tachorpm