diskmargin
Disk-based stability margins of feedback loops
Description
[
computes the disk-based stability margins for the SISO or MIMO negative feedback loop
DM,MM] = diskmargin(L)feedback(L,eye(N)), where N is the number of inputs
and outputs in L.
The diskmargin command returns loop-at-a-time stability margins in
DM and multiloop margins in MM. Disk-based
margin analysis provides a stronger guarantee of stability than the classical gain and phase
margins. For general information about disk margins, see Stability Analysis Using Disk Margins.
___ = diskmargin(___,
specifies an additional skew parameter that biases the modeled gain and phase variation
toward gain increase (positive sigma)sigma) or gain decrease (negative
sigma). You can use this argument to test the relative sensitivity of
stability margins to gain increases versus decreases. You can use this argument with any of
the previous syntaxes.
Examples
diskmargin computes both loop-at-a-time and multiloop disk margins. This example illustrates that loop-at-a-time margins can give an overly optimistic assessment of the true robustness of MIMO feedback loops. Margins of individual loops can be sensitive to small perturbations in other loops, and loop-at-a-time margins ignore such loop interactions.
Consider the two-channel MIMO feedback loop of the following illustration.
The plant model P is drawn from MIMO Stability Margins for Spinning Satellite and C is the static output-feedback gain [1 -2;0 1].
a = [0 10;-10 0]; b = eye(2); c = [1 10;-10 1]; P = ss(a,b,c,0); C = [1 -2;0 1];
Compute the disk-based margins at the plant output. The negative-feedback open-loop response at the plant output is Lo = P*C.
Lo = P*C; [DMo,MMo] = diskmargin(Lo);
Examine the loop-at-a-time disk margins returned in the structure array DM. Each entry in DM contains the stability margins of the corresponding feedback channel.
DMo(1)
ans = struct with fields:
GainMargin: [0 Inf]
PhaseMargin: [-90 90]
DiskMargin: 2
LowerBound: 2
UpperBound: 2
Frequency: Inf
WorstPerturbation: [2×2 ss]
DMo(2)
ans = struct with fields:
GainMargin: [0 Inf]
PhaseMargin: [-90 90]
DiskMargin: 2
LowerBound: 2
UpperBound: 2
Frequency: 0
WorstPerturbation: [2×2 ss]
The loop-at-a-time margins are excellent (infinite gain margin and 90° phase margin). Next examine the multiloop disk margins MMo. These consider independent and concurrent gain (phase) variations in both feedback loops. This is a more realistic assessment because plant uncertainty typically affects both channels simultaneously.
MMo
MMo = struct with fields:
GainMargin: [0.6839 1.4621]
PhaseMargin: [-21.2607 21.2607]
DiskMargin: 0.3754
LowerBound: 0.3754
UpperBound: 0.3762
Frequency: 0
WorstPerturbation: [2×2 ss]
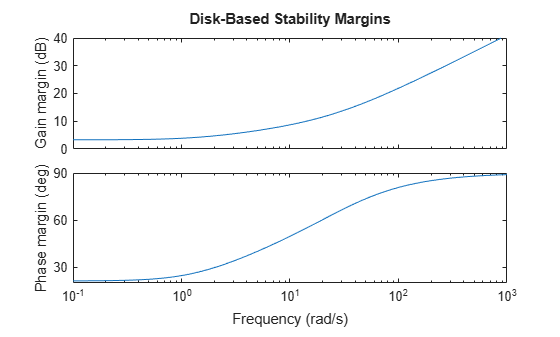
The multiloop gain and phase margins are much weaker than their loop-at-a-time counterparts. Stability is only guaranteed when the gain in each loop varies by a factor less than 1.46, or when the phase of each loop varies by less than 21°. Use diskmarginplot to visualize the gain and phase margins as a function of frequency.
diskmarginplot(Lo)
Typically, there is uncertainty in both the actuators (inputs) and sensors (outputs). Therefore, it is a good idea to compute the disk margins at the plant inputs as well as the outputs. Use Li = C*P to compute the margins at the plant inputs. For this system, the margins are the same at the plant inputs and outputs.
Li = C*P; [DMi,MMi] = diskmargin(Li); MMi
MMi = struct with fields:
GainMargin: [0.6839 1.4621]
PhaseMargin: [-21.2607 21.2607]
DiskMargin: 0.3754
LowerBound: 0.3754
UpperBound: 0.3762
Frequency: 0
WorstPerturbation: [2×2 ss]
Finally, you can also compute the multiloop disk margins for gain or phase variations at both the inputs and outputs of the plant. This approach is the most thorough assessment of stability margins, because it this considers independent and concurrent gain or phase variations in all input and output channels. As expected, of all three measures, this gives the smallest gain and phase margins.
MMio = diskmargin(P,C); diskmarginplot(MMio.GainMargin)
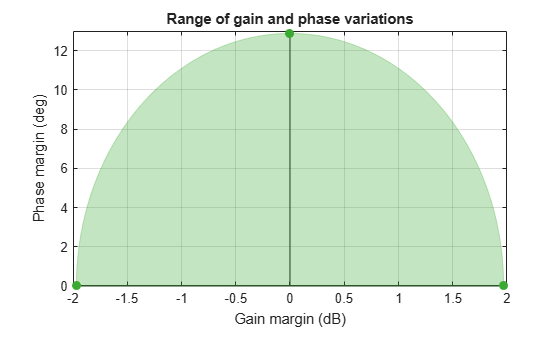
Stability is only guaranteed when the gain varies by a less than 2 dB or when the phase varies by less than 13°. However, these variations take place at the inputs and the outputs of P, so the total change in I/O gain or phase is twice that.
By default, diskmargin computes a symmetric gain margin, with gmin = 1/gmax, and an associated phase margin. In some systems, however, loop stability may be more sensitive to increases or decreases in open-loop gain. Use the skew parameter sigma to examine this sensitivity.
Compute the disk margin and associated disk-based gain and phase margins for a SISO transfer function, at three values of sigma. Negative sigma biases the computation toward gain decrease. Positive sigma biases toward gain increase.
L = tf(25,[1 10 10 10]); DMdec = diskmargin(L,-2); DMbal = diskmargin(L,0); DMinc = diskmargin(L,2); DGMdec = DMdec.GainMargin
DGMdec = 1×2
0.4013 1.3745
DGMbal = DMbal.GainMargin
DGMbal = 1×2
0.6273 1.5942
DGMinc = DMinc.GainMargin
DGMinc = 1×2
0.7717 1.7247
Put together, these results show that in the absence of phase variation, stability is maintained for relative gain variations between 0.4 and 1.72. To see how the phase margin depends on these gain variations, plot the stable ranges of gain and phase variations for each diskmargin result.
diskmarginplot([DGMdec;DGMbal;DGMinc]) legend('sigma = -2','sigma = 0','sigma = 2') title('Stable range of gain and phase variations')
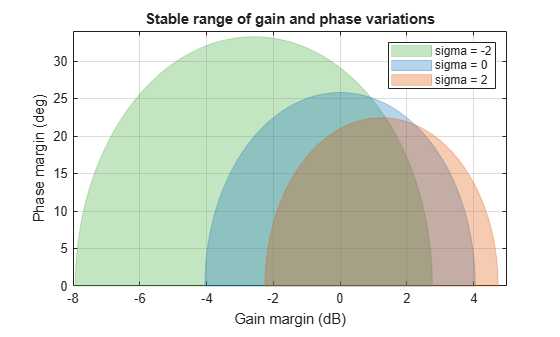
This plot shows that the feedback loop can tolerate larger phase variations when the gain decreases. In other words, the loop stability is more sensitive to gain increase. Although sigma = –2 yields a phase margin as large as 30 degrees, this large value assumes a small gain increase of less than 3 dB. However, the plot shows that when the gain increases by 4 dB, the phase margin drops to less than 15 degrees. By contrast, it remains greater than 30 degrees when the gain decreases by 4 dB.
Thus, varying the skew sigma can give a fuller picture of sensitivity to gain and phase uncertainty. Unless you are mostly concerned with gain variations in one direction (increase or decrease), it is not recommended to draw conclusions from a single nonzero value of sigma. Instead use the default sigma = 0 to get unbiased estimates of gain and phase margins. When using nonzero values of sigma, use both positive and negative values to compare relative sensitivity to gain increase and decrease.
Input Arguments
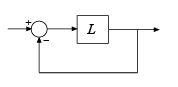
Open-loop response, specified as a dynamic system model. L can
be SISO or MIMO, as long as it has the same number of inputs and outputs.
diskmargin computes the disk-based stability margins for the
negative-feedback closed-loop system feedback(L,eye(N)).
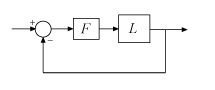
To compute the disk margins of the positive feedback system
feedback(L,eye(N),+1), use
diskmargin(-L).
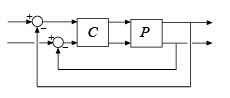
When you have a plant P and a controller C,
you can compute the disk margins for gain (or phase) variations at the plant inputs or
outputs, as in the following diagram.
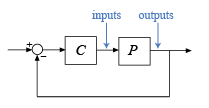
To compute margins at the plant outputs, set
L = P*C.To compute margins at the plant inputs, set
L = C*P.
L can be continuous time or discrete time. If
L is a generalized state-space model (genss
or uss) then diskmargin uses the current or
nominal value of all control design blocks in L.
If L is a frequency-response data model (such as
frd), then diskmargin computes the margins
at each frequency represented in the model. The function returns the margins at the
frequency with the smallest disk margin.
If L is a model array, then diskmargin
computes margins for each model in the array.
Plant, specified as a dynamic system model. P can be SISO or
MIMO, as long as P*C has the same number of inputs and outputs.
diskmargin computes the disk-based stability margins for a
negative-feedback closed-loop system. To compute the disk margins of the system with
positive feedback, use diskmargin(P,-C).
P can be continuous time or discrete time. If
P is a generalized state-space model (genss
or uss) then diskmargin uses the current or
nominal value of all control design blocks in P.
If P is a frequency-response data model (such as
frd), then diskmargin computes the margins
at each frequency represented in the model. The function returns the margins at the
frequency with the smallest disk margin.
Controller, specified as a dynamic system model. C can be SISO
or MIMO, as long as P*C has the same number of inputs and outputs.
diskmargin computes the disk-based stability margins for a
negative-feedback closed-loop system. To compute the disk margins of the system with
positive feedback, use diskmargin(P,-C).
C can be continuous time or discrete time. If
C is a generalized state-space model (genss
or uss) then diskmargin uses the current or
nominal value of all control design blocks in C.
If C is a frequency-response data model (such as
frd), then diskmargin computes the margins
at each frequency represented in the model. The function returns the margins at the
frequency with the smallest disk margin.
Skew of uncertainty region used to compute the stability margins, specified as a real scalar value. This parameter biases the uncertainty used to model gain and phase variations toward gain increase or gain decrease.
The default
sigma= 0 uses a balanced model of gain variation in a range[gmin,gmax], withgmin = 1/gmax.Positive
sigmauses a model with more gain increase than decrease (gmax > 1/gmin).Negative
sigmauses a model with more gain decrease than increase (gmin < 1/gmax).
Use the default sigma = 0 to get unbiased estimates of gain and
phase margins. You can test relative sensitivity to gain increase and decrease by
comparing the margins obtained with both positive and negative
sigma values. For an example, see Sensitivity of Disk-Based Margins to Gain Increase and Decrease. For more detailed
information about how the choice of sigma affects the margin
computation, see Stability Analysis Using Disk Margins.
Output Arguments
Disk margins for each feedback channel with all other loops closed, returned as a
structure for SISO feedback loops, or an N-by-1 structure array for a
MIMO loop with N feedback channels. The fields of
DM(i) are:
| Field | Value |
|---|---|
GainMargin | Disk-based gain margins of the corresponding feedback channel, returned as
a vector of the form [gmin,gmax]. These values express in
absolute units the amount by which the loop gain in that channel can decrease or
increase while preserving stability. For example, if DM(i).GainMargin =
[0.8,1.25] then the gain of the
ith loop can be multiplied by
any factor between 0.8 and 1.25 without causing instability. When
sigma = 0, gmin = 1/gmax. If the
open-loop gain can change sign without loss of stability,
gmin can be less than zero for large enough negative
sigma. If the nominal closed-loop system is unstable,
then DM(i).GainMargin = [1 1]. |
PhaseMargin | Disk-based phase margin of the corresponding feedback channel, returned as
a vector of the form [-pm,pm] in degrees. These values
express the amount by which the loop phase in that channel can decrease or
increase while preserving stability. If the closed-loop system is unstable, then
DM(i).PhaseMargin = [0 0]. |
DiskMargin | Maximum ɑ compatible with closed-loop stability for the
corresponding feedback channel. ɑ parameterizes the
uncertainty in the loop response (see Algorithms). If the
closed-loop system is unstable, then DM(i).DiskMargin =
0. |
LowerBound | Lower bound on disk margin. This value is the same as
DiskMargin. |
UpperBound | Upper bound on disk margin. This value represents an upper limit on the
actual disk margin of the system. In other words, the disk margin is guaranteed
to be no worse than LowerBound and no better than
UpperBound. |
Frequency | Frequency at which the weakest margin occurs for the corresponding loop
channel. This value is in rad/TimeUnit, where
TimeUnit is the TimeUnit property of
L. |
WorstPerturbation | Smallest gain and phase variation that drives the feedback loop
unstable, returned as a state-space (
This state-space model is a diagonal perturbation of the
form For more information on interpreting
When analyzing a linear approximation of a nonlinear system,
it can be useful to inject |
When L = P*C is the open-loop response of a system comprising a
controller and plant with unit negative feedback in each channel,
DM contains the stability margins for variations at the plant
outputs. To compute the stability margins for variations at the plant inputs, use
L = C*P. To compute the stability margins for simultaneous,
independent variations at both the plant inputs and outputs, use MMIO =
diskmargin(P,C).
When L is a model array, DM has additional
dimensions corresponding to the array dimensions of L. For
instance, if L is a 1-by-3 array of two-input, two-output models,
then DM is a 2-by-3 structure array. DM(j,k)
contains the margins for the jth feedback
channel of the kth model in the
array.
Multiloop disk margins, returned as a structure. The gain (or phase) margins
quantify how much gain variation (or phase variation) the system can tolerate in all
feedback channels at once while remaining stable. Thus, MM is a
single structure regardless of the number of feedback channels in the system. (For SISO
systems, MM = DM.) The fields of
MM are:
| Field | Value |
|---|---|
GainMargin | Multiloop disk-based gain margins, returned as a vector of the form
[gmin,gmax]. These values express in absolute units the
amount by which the loop gain can vary in all channels independently and
concurrently while preserving stability. For example, if MM.GainMargin
= [0.8,1.25] then the gain of all loops can be multiplied by any
factor between 0.8 and 1.25 without causing instability. When
sigma = 0, gmin = 1/gmax. |
PhaseMargin | Multiloop disk-based phase margin, returned as a vector of the form
[-pm,pm] in degrees. These values express the amount by
which the loop phase can vary in all channels independently and concurrently
while preserving stability. |
DiskMargin | Maximum ɑ compatible with closed-loop stability. ɑ parameterizes the uncertainty in the loop response (see Algorithms). |
LowerBound | Lower bound on disk margin. This value is the same as
DiskMargin. |
UpperBound | Upper bound on disk margin. This value represents an upper limit on the
actual disk margin of the system. In other words, the disk margin is guaranteed
to be no worse than LowerBound and no better than
UpperBound. |
Frequency | Frequency at which the weakest margin occurs. This value is in
rad/TimeUnit, where TimeUnit is the
TimeUnit property of L. |
WorstPerturbation | Smallest gain and phase variation that drives the feedback loop
unstable, returned as a state-space (
This state-space model is a diagonal perturbation of the
form For more information on interpreting
When analyzing a linear approximation of a nonlinear system,
it can be useful to inject |
When L = P*C is the open-loop response of a system comprising a
controller and plant with unit negative feedback in each channel,
MM contains the stability margins for variations at the plant
outputs. To compute the stability margins for variations at the plant inputs, use
L = C*P. To compute the stability margins for simultaneous,
independent variations at both the plant inputs and outputs, use MMIO =
diskmargin(P,C).
When L is a model array, MM is a structure
array with one entry for each model in L.
Disk margins for independent variations applied simultaneously at input and output
channels of the plant P, returned as a structure having the same
fields as MM.
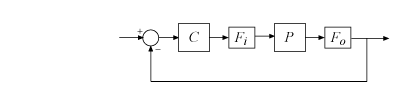
For variations applied simultaneously at inputs and outputs, the
WorstPerturbation field is itself a structure with fields
Input and Output. Each of these fields contains
a state-space model such that for Fi(s) =
MMIO.WorstPerturbation.Input and Fo(s) =
MMIO.WorstPerturbation.Output, the system of the following diagram is
marginally unstable, with a pole on the stability boundary at the frequency
MMIO.Frequency.
These state-space models Input and Output are
diagonal perturbations of the form F(s) = diag(f1(s),...,fN(s)). Each
fj(s) is a real-parameter dynamic system that realizes the
worst-case complex gain and phase variation applied to each channel of the feedback
loop.
Tips
diskmarginassumes negative feedback. To compute the disk margins of a positive feedback system, usediskmargin(-L)ordiskmargin(P,-C).To compute disk margins for a system modeled in Simulink®, first linearize the model to obtain the open-loop response at a particular operating point. Then, use
diskmarginto compute stability margins for the linearized system. For more information, see Stability Margins of a Simulink Model.To compute classical gain and phase margins, use
allmargin.You can visualize disk margins using
diskmarginplot.
Algorithms
References
[1] Blight, James D., R. Lane Dailey, and Dagfinn Gangsaas. “Practical Control Law Design for Aircraft Using Multivariable Techniques.” International Journal of Control 59, no. 1 (January 1994): 93–137. https://doi.org/10.1080/00207179408923071.
[2] Seiler, Peter, Andrew Packard, and Pascal Gahinet. “An Introduction to Disk Margins [Lecture Notes].” IEEE Control Systems Magazine 40, no. 5 (October 2020): 78–95.