trainWithEvolutionStrategy
Train DDPG, TD3 or SAC agent using an evolutionary strategy within a specified environment
Since R2023b
Description
trainStats = trainWithEvolutionStrategy(agent,env,ESOpts)agent within the environment env, using the
evolution strategy training options object ESOpts. Note that
agent is a handle object and it is updated during training, despite
being an input argument. For more information on the training algorithm, see Train agent with evolution strategy.
Examples
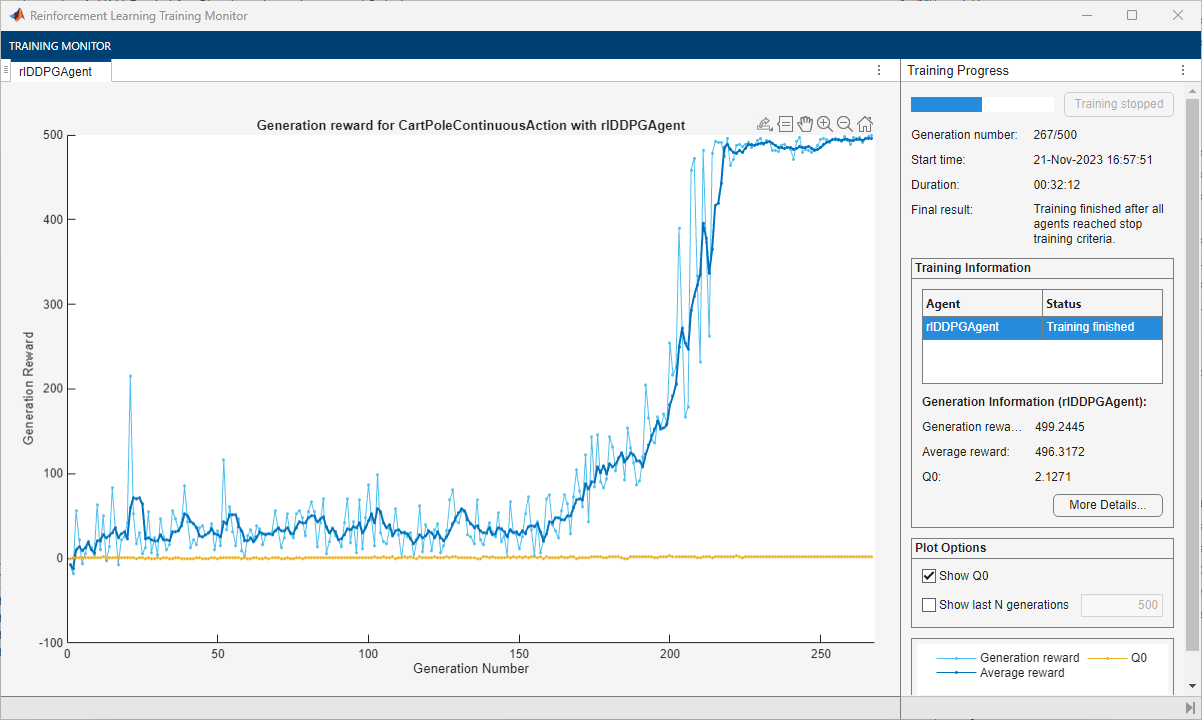
This example shows how to train a DDPG agent using an evolutionary strategy.
Load the predefined environment object representing a cart-pole system with a continuous action space. For more information on this environment, see Use Predefined Control System Environments.
env = rlPredefinedEnv("CartPole-Continuous");The constructor functions initialize the agent networks randomly. Ensure reproducibility of the section by fixing the seed of the random generator.
rng(0)
Create a DDPG agent with default networks.
agent = rlDDPGAgent(getObservationInfo(env),getActionInfo(env));
To create an evolution strategy options object, use rlEvolutionStrategyTrainingOptions.
evsTrainingOpts = rlEvolutionStrategyTrainingOptions( ... PopulationSize=10 , ... ReturnedPolicy="BestPolicy" , ... StopTrainingCriteria="AverageReward" , ... StopTrainingValue=496);
To train the agent, use trainWithEvolutionStrategy.
doTraining = false; if doTraining trainStats = trainWithEvolutionStrategy(agent,env,evsTrainingOpts); else load("rlTrainUsingESAgent.mat","agent"); end
Simulate the agent and display the episode reward.
simOptions = rlSimulationOptions(MaxSteps=500); experience = sim(env,agent,simOptions);

totalReward = sum(experience.Reward)
totalReward = 497.8374
The agent is able to balance the cart-pole system for the whole episode.