tsaregular
Regular signal of a time-synchronous averaged signal
Syntax
Description
Y = tsaregular(X,fs,rpm,orderList)Y of the time-synchronous averaged (TSA)
signal vector X using sampling rate fs, the
rotational speed rpm, and the orders to be retained
orderList. Y is computed by retaining the
primary frequency, the components in orderList, and their respective
harmonics from X. You can use Y to further
extract condition indicators of rotating machinery for predictive maintenance. For
example, extracting the FM0 indicator from Y
is useful in identifying major changes such as gear tooth breakage or heavy wear in a gear
box.
___ = tsaregular(___,
allows you to specify additional parameters using one or more name-value pair arguments.
You can use this syntax with any of the previous input and output arguments.Name,Value)
tsaregular(___) with no output arguments plots the
time-domain and frequency-domain plots of the raw and regular TSA signals.
Examples
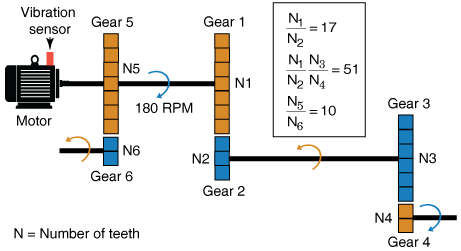
Consider a drivetrain with six gears driven by a motor that is fitted with a vibration sensor, as depicted in the figure below. Gear 1 on the motor shaft meshes with gear 2 with a gear ratio of 17:1. The final gear ratio, that is, the ratio between gears 1 and 2 and gears 3 and 4, is 51:1. Gear 5, also on the motor shaft, meshes with gear 6 with a gear ratio of 10:1. The motor is spinning at 180 RPM, and the sampling rate of the vibration sensor is 50 KHz. To retain the signal containing the meshing components of the gears 1 and 2, gears 3 and 4 and, the shaft rotation, specify their gear ratios of 17 and 51 in orderList. The signal components corresponding to the shaft rotation (order = 1) is always implicitly included in the computation.
rpm = 180;
fs = 50e3;
t = (0:1/fs:(1/3)-1/fs)'; % sample times
orderList = [17 51];
f = rpm/60*[1 orderList 10];In practice, you would use measured data such as vibration signals obtained from an accelerometer. For this example, generate TSA signal X, which is the simulated data from the vibration sensor mounted on the motor.
X = sin(2*pi*f(1)*t) + sin(2*pi*2*f(1)*t) + ... % motor shaft rotation and harmonic 3*sin(2*pi*f(2)*t) + 3*sin(2*pi*2*f(2)*t) + ... % gear mesh vibration and harmonic for gears 1 and 2 4*sin(2*pi*f(3)*t) + 4*sin(2*pi*2*f(3)*t) + ... % gear mesh vibration and harmonic for gears 3 and 4 2*sin(2*pi*10*f(1)*t); % gear mesh vibration for gears 5 and 6
Compute the regular signal of the TSA signal using the sample time, rpm, and the mesh orders to be retained.
Y = tsaregular(X,t,rpm,orderList);
The output Y is a vector containing everything except the gear mesh signal and harmonics for gears 5 and 6.
Visualize the regular signal, the raw TSA signal, and their amplitude spectrum on a plot.
tsaregular(X,fs,rpm,orderList)
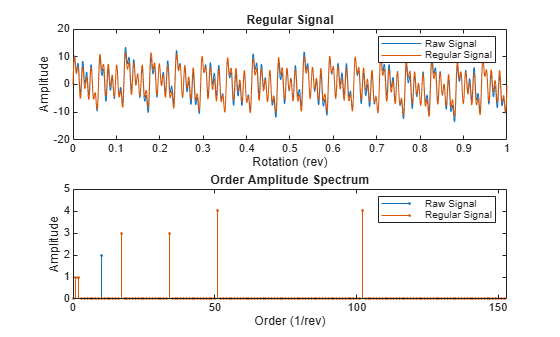
From the amplitude spectrum plot, observe the following components:
The retained component at the 17th order and its harmonic at the 34th order
The second retained component at the 51st order and its harmonic at the 102nd order
The filtered mesh components for gears 5 and 6 at the 10th order
The retained shaft component at the 1st and 2nd orders
The amplitudes on the spectrum plot match the amplitudes of individual signals
In this example, sineWavePhaseMod.mat contains the data of a phase modulated sine wave. XT is a timetable with the sine wave data and rpm used is 60 RPM. The sine wave has a frequency of 32 Hz and to recover the unmodulated sine wave, use 32 as the orderList.
Load the data and the required variables.
load('sineWavePhaseMod.mat','XT','rpm','orders') head(XT,4)
Time Data
______________ _______
0 sec 0
0.00097656 sec 0.2011
0.0019531 sec 0.39399
0.0029297 sec 0.57078
Note that the time values in XT are strictly increasing, equidistant, and finite.
Compute the regular signal and its amplitude spectrum. Set the value of 'Domain' to 'frequency' since the orders are in Hz.
[Y,S] = tsaregular(XT,rpm,orders,'Domain','frequency')
Y=1024×1 timetable
Time Data
______________ __________
0 sec -2.552e-15
0.00097656 sec 0.14928
0.0019531 sec 0.29283
0.0029297 sec 0.42512
0.0039062 sec 0.54108
0.0048828 sec 0.63624
0.0058594 sec 0.70695
0.0068359 sec 0.75049
0.0078125 sec 0.7652
0.0087891 sec 0.75049
0.0097656 sec 0.70695
0.010742 sec 0.63624
0.011719 sec 0.54108
0.012695 sec 0.42512
0.013672 sec 0.29283
0.014648 sec 0.14928
⋮
S = 1024×1 complex
0.0000 + 0.0000i
0.0000 - 0.0000i
0.0000 + 0.0000i
0.0000 + 0.0000i
-0.0000 - 0.0000i
-0.0000 - 0.0000i
-0.0000 - 0.0000i
-0.0000 + 0.0000i
0.0000 + 0.0000i
-0.0000 - 0.0000i
-0.0000 + 0.0000i
0.0000 + 0.0000i
-0.0000 - 0.0000i
0.0000 - 0.0000i
-0.0000 - 0.0000i
⋮
The output Y is a timetable that contains the regular signal, that is, the unmodulated sine wave, while S is a vector that contains the amplitude spectrum of the regular signal Y.
In this example, sineWaveAmpMod.mat contains the data of an amplitude modulated sine wave. X is a vector with the amplitude modulated sine wave data obtained at a shaft speed of 60 RPM. The unmodulated sine wave has a frequency of 32 Hz and amplitude of 1.0 units.
Load the data, and plot the regular signal of the amplitude modulated TSA signal X. To retain the unmodulated signal, specify the frequency of 32 Hz in orderList. Set the value of 'Domain' to 'frequency'.
load('sineWaveAmpMod.mat','X','t','rpm','orderList') tsaregular(X,t,rpm,orderList,'Domain','frequency');
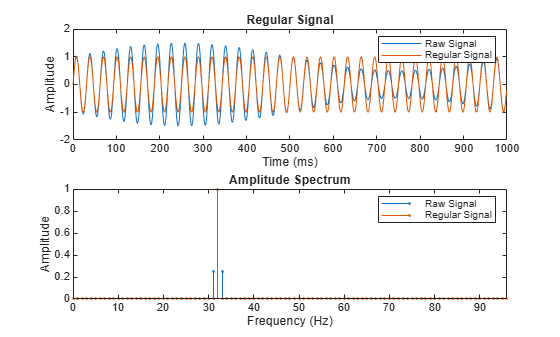
From the plot, observe the waveform and amplitude spectrum of the regular and raw signals, respectively. Observe that the regular signal contains the unmodulated sine wave with an amplitude of 1.0 units and frequency of 32 Hz.
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
Regular Signal
The regular signal is computed from the TSA signal by retaining the following from the signal spectrum:
Shaft frequency and its harmonics
Gear meshing frequencies and their harmonics
Optionally, the sidebands specified in '
NumSidebands' at the gear meshing frequencies and their harmonics
tsaregular uses a bandwidth equal to the shaft speed times the value of
'NumSidebands', around the frequencies of interest, to compute
Y from the TSA signal. The regular signal is related to the residual
signal through the equation . If the first-order sidebands are retained in the regular signal, then, .
Amplitude Spectrum
The amplitude spectrum of the regular signal is computed as follows,
Here, Y is the regular signal.
References
[1] McFadden, P.D. "Examination of a Technique for the Early Detection of Failure in Gears by Signal Processing of the Time Domain Average of the Meshing Vibration." Aero Propulsion Technical Memorandum 434. Melbourne, Australia: Aeronautical Research Laboratories, Apr. 1986.
[2] Večeř, P., Marcel Kreidl, and R. Šmíd. "Condition Indicators for Gearbox Monitoring Systems." Acta Polytechnica 45.6 (2005), pages 35-43.
[3] Zakrajsek, J. J., Townsend, D. P., and Decker, H. J. "An Analysis of Gear Fault Detection Methods as Applied to Pitting Fatigue Failure Data." Technical Memorandum 105950. NASA, Apr. 1993.
[4] Zakrajsek, James J. "An investigation of gear mesh failure prediction techniques." National Aeronautics and Space Administration Cleveland OH Lewis Research Center, 1989. No. NASA-E-5049.
Extended Capabilities
Version History
Introduced in R2018b