tdoaposest
Syntax
Description
Estimate target positions from time-difference-of-arrival (TDOA) measurements and anchor positions. Estimate variances of the target positions.
Examples
Estimate TDOA at five anchors with known positions in the presence of multipath by applying the GCC-PHAT algorithm on the received signals from a target. Then, the five anchors generate all TDOA combinations of TDOA estimates at different anchor pairs to form all possible TDOA groups. Finally, the five anchors apply two-step WLLS algorithm on each TDOA group using anchor positions. The data is loaded from the TDOAEstimatorExampleData mat-file, whose variables are listed below:
Variable | Definition |
|---|---|
Xtime | Time-domain received signals |
fs | Sample frequency |
anchorpos | Anchor positions |
npow | Noise power |
tgtpos | Target positions |
load TDOAEstimatorExampleDataConfigure the TDOA estimator.
tdoaEstimator = phased.TDOAEstimator(SampleRate=fs, ...
NumEstimates=2,VarianceOutputPort=true,NoisePower=npow);Perform TDOA estimation.
[tdoaest,tdoavar] = tdoaEstimator(Xtime);
Generate all TDOA combinations to form all possible TDOA groups.
tdoaestcell = num2cell(tdoaest,1);
tdoagrouptable = combinations(tdoaestcell{:});
tdoagroup = table2array(tdoagrouptable);TDOA position estimation.
tgtposest = tdoaposest(tdoagroup,tdoavar,anchorpos);
Remove all invalid position estimates.
tgtposestvalid = tgtposest(:,~isnan(tgtposest(1,:)));
RMSE of the target position estimates.
rmsetgtpos = rmse(tgtposestvalid,tgtpos)
rmsetgtpos = 1×2
0.1848 0.6516
disp(['RMS TDOA positioning error = ',num2str(rmsetgtpos),' meters.'])
RMS TDOA positioning error = 0.1848 0.65161 meters.
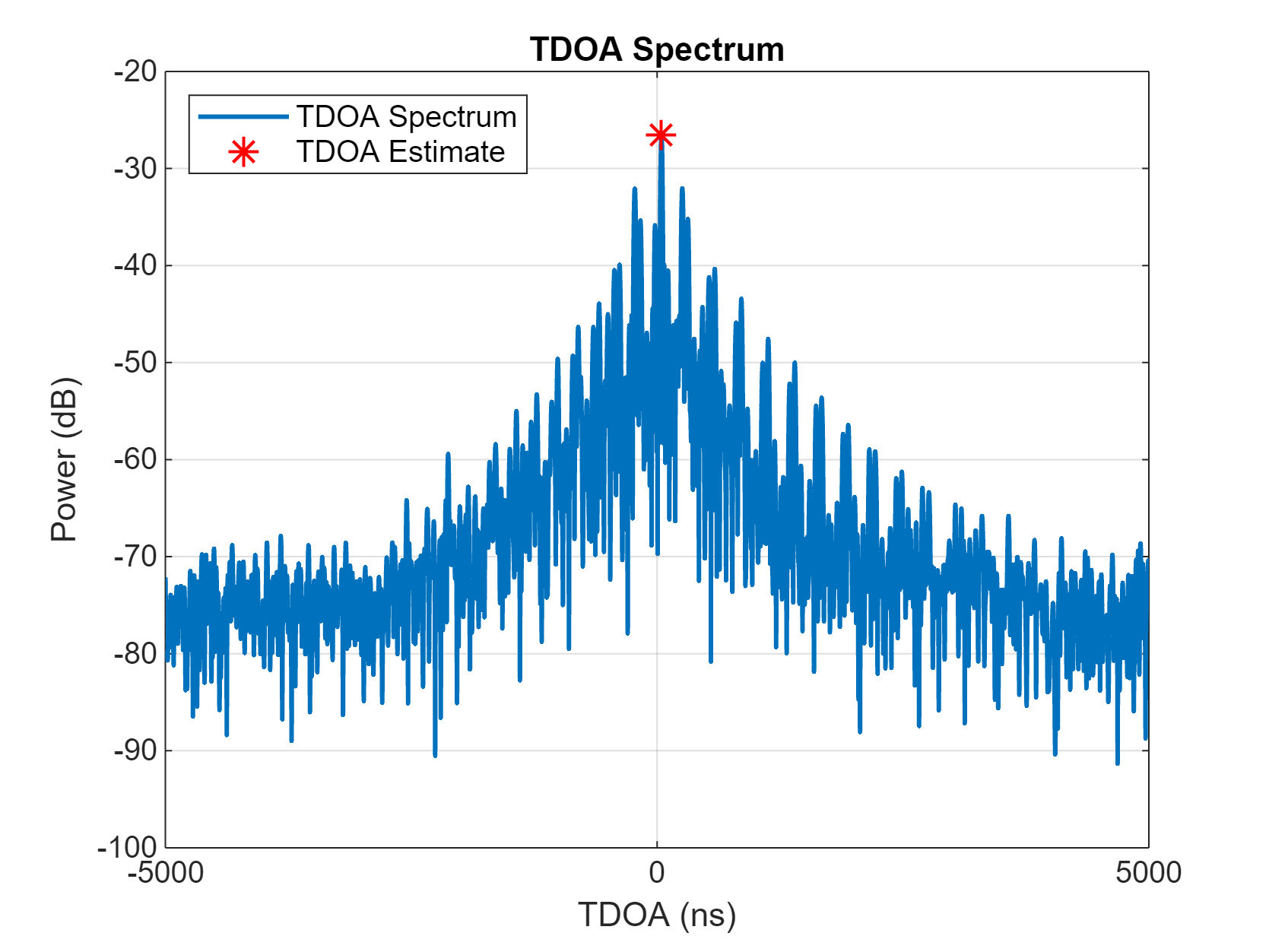
plotTDOASpectrum(tdoaEstimator,AnchorPairIndex=4)
Input Arguments
Output Arguments
Algorithms
References
[1] Zekavat, Seyed A., and R. Michael Buehrer, eds. Handbook of Position Location: Theory, Practice, and Advances. IEEE Series on Mobile & Digital Communication. Hoboken, New Jersey: Wiley-IEEE Press, 2019.
[2] Molisch, Andreas F. Wireless Communications: From Fundamentals to Beyond 5G. Third edition. IEEE Press. Hoboken, NJ: Wiley-IEEE Press, 2023.
[3] Chan, Y.T., and K.C. Ho. “A Simple and Efficient Estimator for Hyperbolic Location.” IEEE Transactions on Signal Processing 42, no. 8 (August 1994): 1905–15. https://doi.org/10.1109/78.301830.
[4] R. Amiri, F. Behnia and A. Noroozi, "An Efficient Estimator for TDOA-Based Source Localization With Minimum Number of Sensors," in IEEE Communications Letters, vol. 22, no. 12, pp. 2499-2502, Dec. 2018.
[5] Marco Compagnoni et al., "A geometrical–statistical approach to outlier removal for TDOA measurements," in IEEE Transactions on Signal Processing, vol. 65, no. 15, pp. 3960-3975, Aug. 2017
[6] Jie Xiong, Karthikeyan Sundaresan, and Kyle Jamieson, "ToneTrack: Leveraging Frequency-Agile Radios for Time-Based Indoor Wireless Localization," in Proceedings of the 21st Annual International Conference on Mobile Computing and Networking (MobiCom '15), pp. 537–549, 2015.
[7] M. Malanowski and K. Kulpa, "Two Methods for Target Localization in Multistatic Passive Radar," in IEEE Transactions on Aerospace and Electronic Systems, vol. 48, no. 1, pp. 572-580, Jan. 2012.
[8] P. Stoica and J. Li, "Lecture Notes - Source Localization from Range-Difference Measurements," in IEEE Signal Processing Magazine, vol. 23, no. 6, pp. 63-66, Nov. 2006.