phased.MVDREstimator
MVDR (Capon) spatial spectrum estimator for ULA
Description
The phased.MVDREstimator object computes a minimum variance distortionless
response (MVDR) spatial spectrum estimate for a uniform linear array (ULA). The existing
literature also refers this direction of arrival (DOA) estimator as a Capon DOA
estimator.
To estimate the spatial spectrum:
Create the
phased.MVDREstimatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
mvdrEstimator = phased.MVDREstimator creates an MVDR spatial
spectrum estimator System object™, mvdrEstimator. The object estimates the spectrum of
the incoming signal using a narrowband MVDR beamformer for a ULA.
mvdrEstimator = phased.MVDREstimator(
sets properties using one or more optional name-value arguments. For example,
Name=Value)OperatingFrequency=4e8 sets the operating frequency to
4e8.
Properties
Usage
Description
Y = mvdrEstimator(X) estimates the spatial spectrum from
X.
[Y,ang] = mvdrEstimator(X) additionally returns output
ang as the DOA of the signal when the DOAOutputPort property value is true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
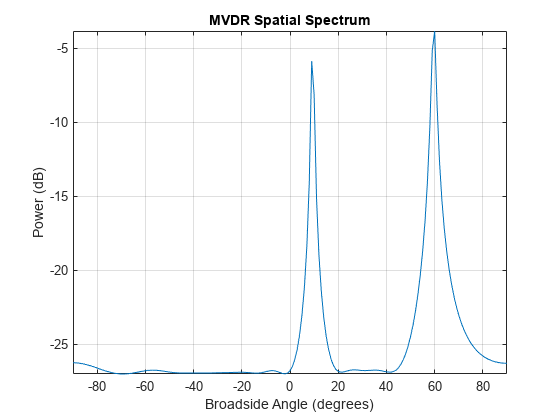
First, estimate the DOAs of two signals received by a standard 10-element ULA with element spacing of 1 meter. The antenna operating frequency is 150 MHz. The actual direction of the first signal is 10° in azimuth and 20° in elevation. The direction of the second signal is 60° in azimuth and −5° in elevation. Then, plot the MVDR spatial spectrum.
Create the signals with added noise. Then, create the ULA System object™.
fs = 8000; t = (0:1/fs:1).'; x1 = cos(2*pi*t*300); x2 = cos(2*pi*t*400); array = phased.ULA(NumElements=10,ElementSpacing=1); array.Element.FrequencyRange = [100e6 300e6]; fc = 150.0e6; x = collectPlaneWave(array,[x1 x2],[10 20;60 -5]',fc); noise = 0.1*(randn(size(x)) + 1i*randn(size(x)));
Create an MVDR estimator System object.
estimator = phased.MVDREstimator(SensorArray=array,...
OperatingFrequency=fc,DOAOutputPort=true,NumSignals=2);Estimate the DOAs.
[y,doas] = estimator(x + noise); doas = broadside2az(sort(doas),[20 -5])
doas = 1×2
9.5829 60.3813
Plot the spectrum.
plotSpectrum(estimator)
References
[1] Van Trees, H. Optimum Array Processing. New York: Wiley-Interscience, 2002.
Extended Capabilities
Version History
Introduced in R2011a