hyperbolic
(Not recommended) Solve hyperbolic PDE problem
hyperbolic is not recommended. Use solvepde instead.
Syntax
Description
Hyperbolic equation solver
Solves PDE problems of the type
on a 2-D or 3-D region Ω, or the system PDE problem
The variables c, a, f, and d can depend on position, time, and the solution u and its gradient.
u = hyperbolic(u0,ut0,tlist,model,c,a,f,d)
on a 2-D or 3-D region Ω, or the system PDE problem
with geometry, mesh, and boundary conditions specified in
model, with initial value u0 and initial
derivative with respect to time ut0. The variables
c, a, f, and
d in the equation correspond to the function coefficients
c, a, f, and
d respectively.
u = hyperbolic(___,'Stats','off')
Examples
Solve the wave equation
on the square domain specified by squareg.
Create a PDE model and import the geometry.
model = createpde; geometryFromEdges(model,@squareg); pdegplot(model,'EdgeLabels','on') ylim([-1.1,1.1]) axis equal
Set Dirichlet boundary conditions for , and Neumann boundary conditions
for . (The Neumann boundary condition is the default condition, so the second specification is redundant.)
applyBoundaryCondition(model,'dirichlet','Edge',[2,4],'u',0); applyBoundaryCondition(model,'neumann','Edge',[1,3],'g',0);
Set the initial conditions.
u0 = 'atan(cos(pi/2*x))'; ut0 = '3*sin(pi*x).*exp(cos(pi*y))';
Set the solution times.
tlist = linspace(0,5,31);
Give coefficients for the problem.
c = 1; a = 0; f = 0; d = 1;
Generate a mesh and solve the PDE.
generateMesh(model,'GeometricOrder','linear','Hmax',0.1); u1 = hyperbolic(u0,ut0,tlist,model,c,a,f,d);
452 successful steps 49 failed attempts 1004 function evaluations 1 partial derivatives 131 LU decompositions 1003 solutions of linear systems
Plot the solution at the first and last times.
figure pdeplot(model,'XYData',u1(:,1)) axis equal

figure pdeplot(model,'XYData',u1(:,end)) axis equal
For a version of this example with animation, see Wave Equation on Square Domain.
Solve the wave equation
on the square domain specified by squareg, using a geometry function to specify the geometry, a boundary function to specify the boundary conditions, and using initmesh to create the finite element mesh.
Specify the geometry as @squareg and plot the geometry.
g = @squareg; pdegplot(g,'EdgeLabels','on') ylim([-1.1,1.1]) axis equal
Set Dirichlet boundary conditions for , and Neumann boundary conditions
for . (The Neumann boundary condition is the default condition, so the second specification is redundant.)
The squareb3 function specifies these boundary conditions.
b = @squareb3;
Set the initial conditions.
u0 = 'atan(cos(pi/2*x))'; ut0 = '3*sin(pi*x).*exp(cos(pi*y))';
Set the solution times.
tlist = linspace(0,5,31);
Give coefficients for the problem.
c = 1; a = 0; f = 0; d = 1;
Create a mesh and solve the PDE.
[p,e,t] = initmesh(g); u = hyperbolic(u0,ut0,tlist,b,p,e,t,c,a,f,d);
462 successful steps 70 failed attempts 1066 function evaluations 1 partial derivatives 156 LU decompositions 1065 solutions of linear systems
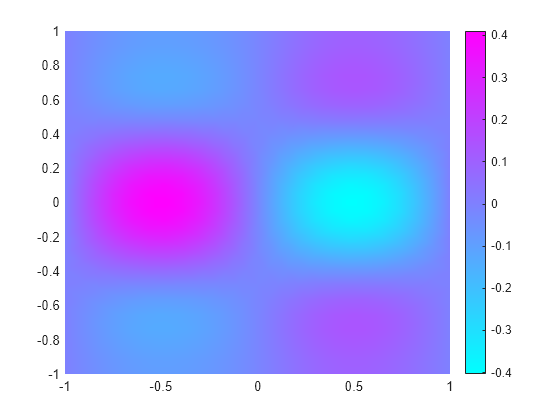
Plot the solution at the first and last times.
figure pdeplot(p,e,t,'XYData',u(:,1)) axis equal
figure pdeplot(p,e,t,'XYData',u(:,end)) axis equal

For a version of this example with animation, see Wave Equation on Square Domain.
Solve a hyperbolic problem using finite element matrices.
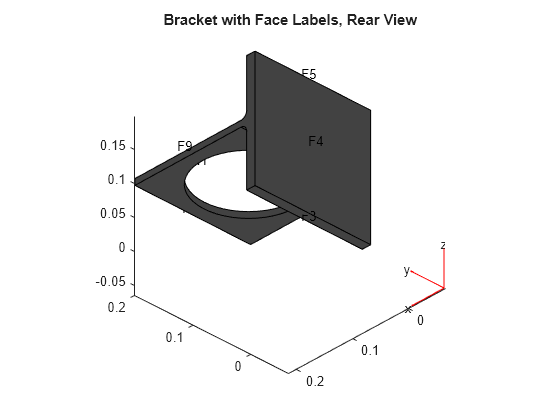
Create a model and import the BracketWithHole.stl geometry.
model = createpde(); importGeometry(model,'BracketWithHole.stl'); figure pdegplot(model,'FaceLabels','on') view(30,30) title('Bracket with Face Labels')
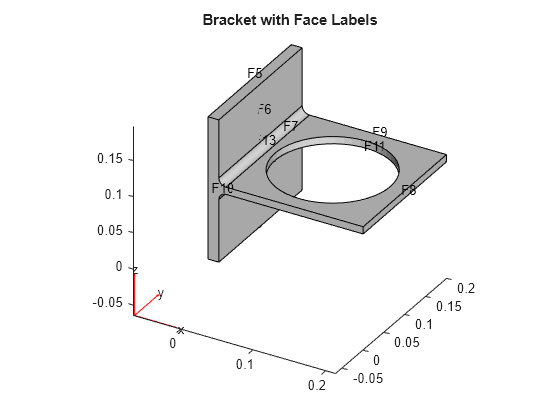
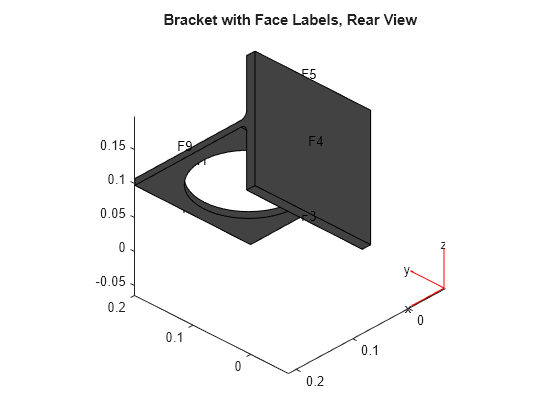
figure pdegplot(model,'FaceLabels','on') view(-134,-32) title('Bracket with Face Labels, Rear View')
Set coefficients c = 1, a = 0, f = 0.5, and d = 1.
c = 1; a = 0; f = 0.5; d = 1;
Generate a mesh for the model.
generateMesh(model);
Create initial conditions and boundary conditions. The boundary condition for the rear face is Dirichlet with value 0. All other faces have the default boundary condition. The initial condition is u(0) = 0, du/dt(0) = x/2. Give the initial condition on the derivative by calculating the x-position of each node in xpts, and passing x/2.
applyBoundaryCondition(model,'Face',4,'u',0); u0 = 0; xpts = model.Mesh.Nodes(1,:); ut0 = xpts(:)/2;
Create the associated finite element matrices.
[Kc,Fc,B,ud] = assempde(model,c,a,f); [~,M,~] = assema(model,0,d,f);
Solve the PDE for times from 0 to 2.
tlist = linspace(0,5,50); u = hyperbolic(u0,ut0,tlist,Kc,Fc,B,ud,M);
1487 successful steps 68 failed attempts 3015 function evaluations 1 partial derivatives 269 LU decompositions 3014 solutions of linear systems
View the solution at a few times. Scale all the plots to have the same color range by using the clim command.
umax = max(max(u)); umin = min(min(u)); subplot(2,2,1) pdeplot3D(model,'ColorMapData',u(:,5)) clim([umin umax]) title('Time 1/2') subplot(2,2,2) pdeplot3D(model,'ColorMapData',u(:,10)) clim([umin umax]) title('Time 1') subplot(2,2,3) pdeplot3D(model,'ColorMapData',u(:,15)) clim([umin umax]) title('Time 3/2') subplot(2,2,4) pdeplot3D(model,'ColorMapData',u(:,20)) clim([umin umax]) title('Time 2')

The solution seems to have a frequency of one, because the plots at times 1/2 and 3/2 show maximum values, and those at times 1 and 2 show minimum values.
Solve a hyperbolic problem that includes damping. You must use the finite element matrix form to use damping.
Create a model and import the BracketWithHole.stl geometry.
model = createpde(); importGeometry(model,'BracketWithHole.stl'); figure pdegplot(model,'FaceLabels','on') view(30,30) title('Bracket with Face Labels')
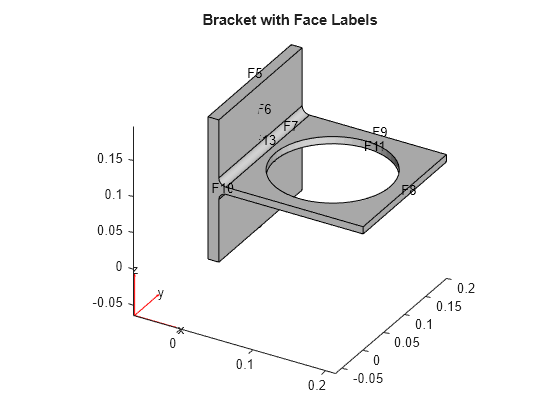
figure pdegplot(model,'FaceLabels','on') view(-134,-32) title('Bracket with Face Labels, Rear View')
Set coefficients c = 1, a = 0, f = 0.5, and d = 1.
c = 1; a = 0; f = 0.5; d = 1;
Generate a mesh for the model.
generateMesh(model);
Create initial conditions and boundary conditions. The boundary condition for the rear face is Dirichlet with value 0. All other faces have the default boundary condition. The initial condition is u(0) = 0, du/dt(0) = x/2. Give the initial condition on the derivative by calculating the x-position of each node in xpts, and passing x/2.
applyBoundaryCondition(model,'Face',4,'u',0); u0 = 0; xpts = model.Mesh.Nodes(1,:); ut0 = xpts(:)/2;
Create the associated finite element matrices.
[Kc,Fc,B,ud] = assempde(model,c,a,f); [~,M,~] = assema(model,0,d,f);
Use a damping matrix that is 10% of the mass matrix.
Damping = 0.1*M;
Solve the PDE for times from 0 to 2.
tlist = linspace(0,5,50);
u = hyperbolic(u0,ut0,tlist,Kc,Fc,B,ud,M,'DampingMatrix',Damping);1434 successful steps 67 failed attempts 2769 function evaluations 1 partial derivatives 279 LU decompositions 2768 solutions of linear systems
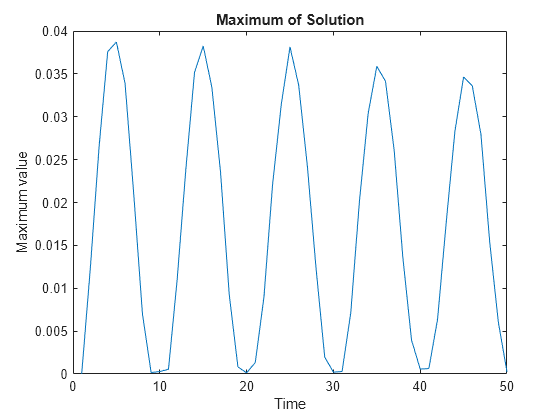
Plot the maximum value at each time. The oscillations damp slightly as time increases.
plot(max(u)) xlabel('Time') ylabel('Maximum value') title('Maximum of Solution')